项目理念|凸轮口径
项目名称: CamCalibre
介绍:
相机校准是计算机视觉应用中的一项重要任务。在具有单个静态摄像机的视频监控系统中,运动物体的目标跟踪结果可以有效地用于摄像机标定。尽管目标跟踪的凸轮校准已经研究了多年,但它仍然面临着许多挑战。凸轮校准的性能高度依赖于提取的头部和足部位置的准确性,这与分割和跟踪方法的鲁棒性有关。因此,我们尝试使用强大的对象分割和跟踪系统来实现准确的头/脚定位。它们是根据跟踪结果和每个对象的分割前景块来提取的。
概念框架:
我们提出了一种设计系统的方法,它可以使用深度学习技术优化跟踪结果,即卷积神经网络 (CNN),这是一种快速的对象检测方法。
为了实现我们的项目,我们使用要检测的对象的一系列正图像和负图像并有效地找到结果。我们使用Python语言的 TensorFlow 库来实现这一点。该系统可以使用传感器来实现,以远程跟踪对象,例如自动驾驶汽车,此外,小偷捕捉,驾驶员辅助等。这样,它可以有效地完成,如下面的快照所示。
客观的:
目标是设计一个强大而高效的系统来解决视频监控领域的目标跟踪问题以及实时视频分析。
目前的问题:
最近的研究表明,在视频监控中,跟踪对象存在具有挑战性的问题,例如摄像机旋转、错误定位等。假设在现场比赛中,要跟踪一个物体,即一个球,因此,在现场比赛期间,摄像机支架不会受到强烈打击时无法追踪。因此,相机的制作方式使其能够捕捉到自己并逐个显示生成的球。实时成本将更少且效率更高。
快照: 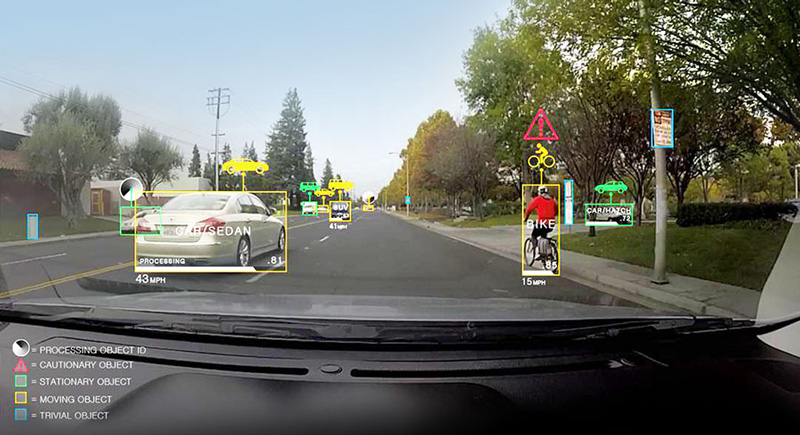

使用的工具:
- 传感器(将数据私下发送到云存储)
- 总部相机
- Python 3.4+
- OpenCV(开源计算机视觉库)
为此,我们使用深度学习技术使用 CNN(卷积神经网络)和 TensorFlow 库对此进行建模。
未来增强:
未来,虽然我们可以在许多视频监控应用中实现,但它也可以在各种检测和跟踪对象的平台上实现,如赛车、摩托车比赛、板球、足球等现场比赛,以在比赛期间协助球员、观众。
此外,我们还可以在任何地方实现此功能以跟踪任何类型的对象,并使用传感器,我们可以从云端私下获取信息并远程生成结果。
GitHub 代码库链接: https://github.com/shaanhk/CamCaliber
团队成员:
- 阿夫扎尔·安萨里
- 桑
注意:这个项目想法是为 ProGeek Cup 2.0- GeeksforGeeks 的项目竞赛贡献的。