📌 相关文章
- 数字通信-增量调制
- 脉冲编码调制 (PCM) 和增量调制 (DM) 之间的区别(1)
- 脉冲编码调制 (PCM) 和增量调制 (DM) 之间的区别
- 增量调制 (DM) 和差分脉冲编码调制 (DPCM) 之间的区别(1)
- 增量调制 (DM) 和差分脉冲编码调制 (DPCM) 之间的区别
- &-Tex命令(1)
- 给定2D数组中的最小和子矩阵
- Python – GTK+ 3 中的网格容器
- 检查数组的素数元素的和是否为素数
- ruby 数组减数组 - Ruby 代码示例
- 素数的递归程序
- 可以刻在矩形中的最大可能的圆
- Python|提取过滤的字典值
- python 跟踪表 - Python 代码示例
- html 文本框 - Html 代码示例
- 在 termux 中安装 msf - Shell-Bash 代码示例
- 检查是否可以通过与上一跳重复多次,少跳一次或相同数目的索引重复跳转来到达已排序数组的末尾
- 从0到N的连续数字的汉明差总和|套装2
- Kexilies - 任何代码示例
- 如何在python代码示例中打印字符串
- gogole - 任何代码示例
- depmod:未找到 - Shell-Bash 代码示例
- 如何在javascript代码示例中将名称转换为首字母
- 国际空间研究组织 | ISRO CS 2011 |问题 17
- 不等于 java 代码示例
- DXC技术面试体验(校内)
- laravel api 路由 - PHP 代码示例
- 弗吉尼亚技术 - 任何代码示例
- mysql 将变量设置为今天的日期 - SQL 代码示例
📜 增量调制
📅 最后修改于: 2020-11-23 04:53:46 🧑 作者: Mango
信号的采样率应高于奈奎斯特率,以实现更好的采样。如果差分PCM(DPCM)中的该采样间隔大大减小,则样本间的幅度差异非常小,就好像该差异是1位量化一样,步长也非常小,即Δ (delta )。
什么是增量调制?
调制类型,其中采样率高得多,并且量化后的步长具有较小的值Δ ,这种调制称为增量调制。
增量调制的特点
-
采用过采样的输入以充分利用信号相关性。
-
量化设计很简单。
-
输入序列远高于奈奎斯特速率。
-
质量中等。
-
调制器和解调器的设计很简单。
-
输出波形的阶梯近似值。
-
步长非常小,即Δ (δ)。
-
比特率可以由用户决定。
-
它需要更简单的实现。
增量调制是DPCM技术的简化形式,也被视为1位DPCM方案。随着采样间隔的减小,信号相关性会更高。
增量调制器
增量调制器包括一个1位量化器和一个延迟电路以及两个求和电路。以下是增量调制器的框图。
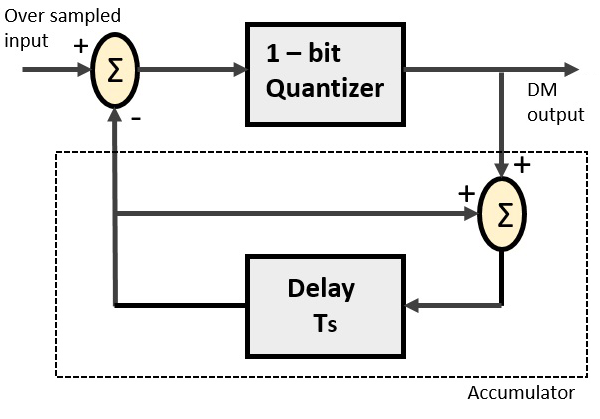
阶梯状近似波形将是增量调制器的输出,步长为增量( Δ )。波形的输出质量中等。
三角洲解调器
增量解调器包括低通滤波器,求和器和延迟电路。此处消除了预测器电路,因此没有假定的输入提供给解调器。
以下是增量解调器的框图。
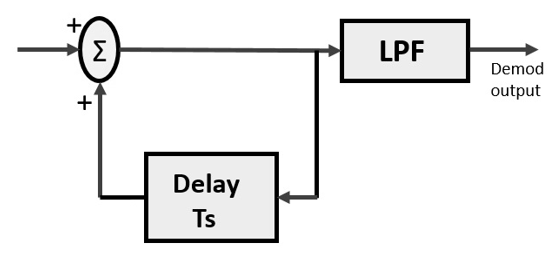
使用低通滤波器的原因有很多,但突出的原因是消除带外信号的噪声。可能在发射机处发生的步长误差称为颗粒噪声,在此已消除。如果没有噪声,则调制器输出等于解调器输入。
DM比DPCM的优势
- 1位量化器
- 调制器和解调器的设计非常简单
但是, DM中存在一些噪声,以下是噪声的类型。
- 斜率过载失真(当Δ小时)
- 颗粒噪声(当Δ大时)
自适应增量调制
在数字调制中,在确定步长时会遇到某些问题,这会影响输出波的质量。
在调制信号的斜率较大时,需要较大的步长;在消息的斜率较小时,则需要较小的步长。结果,错过了细节。因此,最好能根据需要控制步长的调整,以便以期望的方式获得采样。这是自适应增量调制(ADM)的概念。