在控制系统中,根源分析是一种图形化策略,用于查看系统基础如何随特定系统边界的变化而变化,通常是在反馈系统内部进行附加。
控制系统中根源的目的如下:
- 寻找稳定性
- 检查点是否在根源上
- 查找系统增益,即“ k”或系统参数
根轨迹的构造规则:
规则1:在实轴上将存在一个点,如果该点右侧的极点和零点之和必须为奇数,则根轨迹分支。
规则2:渐近线:它们是根轨迹分支,从实轴开始并接近无穷大。
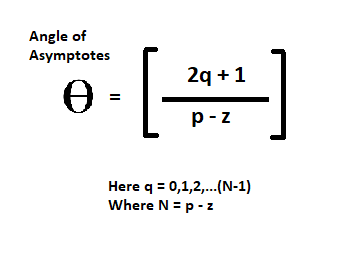
渐近线数“ N = P – Z”
这里“ P”是极数,“ Z”是零数
规则3:渐近线的角度
规则4:质心:渐近线在实轴上的交点称为质心

规则5:断点(BP):有两种类型
- 突破点(BAP)
- 突破点(BIP)
规则6:具有假想轴的根轨迹交点(IP)。
规则7:
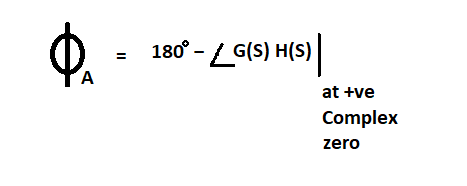
a)偏离角:计算为复共轭极或虚极

b)到达角:计算复共轭零或虚零
代码 :
% Row of 1×2
NUM = [1 10];
% Row of 1×4
DEN = [1 6 8 0];
% Row of 1×2
poly1 = [1 2];
% Row of 1×2
poly2 = [1 4];
% convolves vectors poly1 and poly2,
% multiplying the polynomials whose coefficients
% are the elements of poly1 and poly2
poly = conv(poly1, poly2);
% returns the roots of the polynomial
% represented by DEN as a column vector
roots(DEN);
% Continuous time transfer function
sys = tf(NUM, DEN);
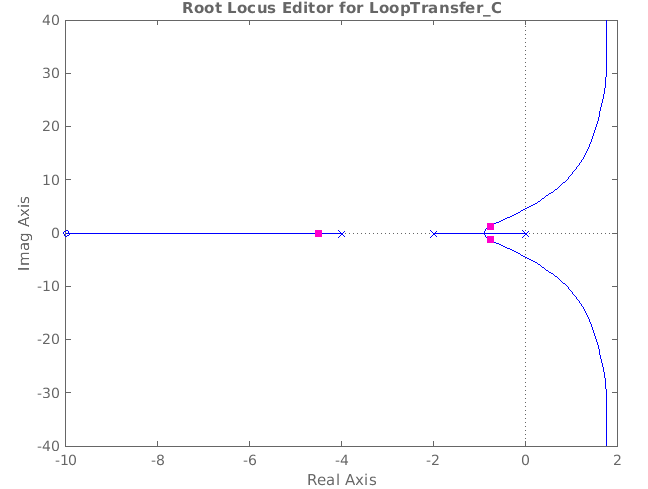
% GUI for per-forming Root Locus analysis
rltool(sys);
输出 :