里程计
里程计
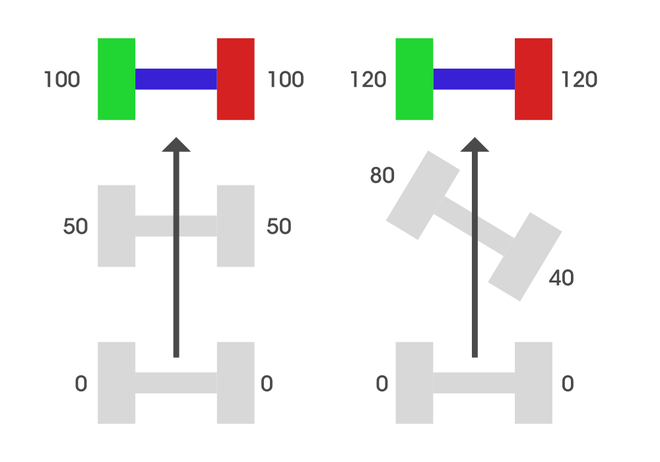
里程计是使用运动传感器来确定机器人相对于某个已知位置的位置变化。其背后的想法是随着时间的推移位置的增量变化。
我们称为相对于地板的线性位移的位置变化可以根据车轮的转数来测量。这种方法为短期测量提供了良好的精度,但在进行大位移时会导致很多误差。
里程计的使用
- 可与位置估计器一起使用以提供更好的估计。
- 在某些没有其他参考可用的情况下,里程计是唯一可用的导航信息。
- 机器人可以具有足够的稳定性,以便它们能够检测地标并用于在有限区域内进行绘图。
里程计错误:
里程计有两种类型的错误:
- 系统误差
- 非系统性错误
系统误差
系统错误是由系统的固有缺陷或不准确引起的。在这里,我们的系统是一个机器人,我们在其上执行里程计。这包括:
- 车轮直径不准确。
- 轴距不准确。
- 车轮错位。
- 有限的编码器分辨率。
- 有限编码器采样率。
系统误差的测量:
Bornstein 和 Forg 提出了一个测量系统误差的简单模型。他们考虑了系统误差的两个主要原因,并提出了以下方法:
- 不等轮径:

- 轴距的不确定性:
非系统性错误
非系统误差是主要由环境或计算/估计引起的误差。以下是非系统性错误的一些原因:
- 不平整的地板
- 地板上出现意外物体
- 车轮打滑、超速、快速转弯等
非系统误差的测量和减少
一些信息可以从返回正误差的传播中得出。这可以认为是估计的标准偏差。但是,它也取决于地表环境和机器人。因此,不可能为非系统误差设计一个测试程序。
如果颠簸集中在第一回合开始时,返回位置误差会很小。相反,它会更大。因此,返回位置误差将不是一个好的衡量标准,相反,返回方向误差将是一个更好的选择。
减少非系统误差
- 轴距小的机器人更容易出现方向错误。
- 用于里程计的车轮应该是刀口薄且不可压缩的。
辅助轮和基本编码器 Tailers
演示差分驱动的基本编码器轨迹
- 辅助轮:辅助轮与承重轮配套使用,承重轮采用钢制编码专用,适用于差速驱动、阿克曼车等。
- 基本编码器轨迹:单独的拖车主要用于履带式车辆,因为在转弯过程中有大量的滑动。当地面具有一定的特性时可以使用。在通过障碍物或转动拖车时会升起。
参考:
- 里程计