在直角坐标系中给定四个点(x,y)。找到四边形的可能数目,而不是将所有四个点合并而成的数目。
例子:
Input: A=(0, 9), B=(-1, 0), C=(5, -1), D=(5, 9)
Output: Only one quadrilateral is possible (ABCD) in any orientation
Input: A=(0, 9), B=(-1, 0), C=(5, -1), D=(0, 3)
Output: 3 quadrilaterals are possible (ABCD), (ADBC), (ABDC)
第二个例子的图: 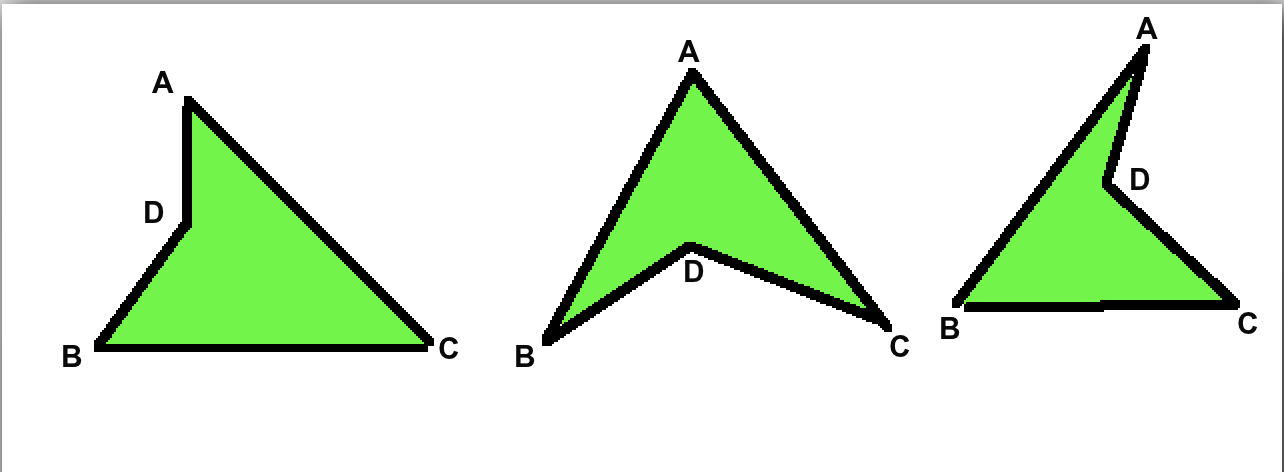
方法:
- 我们需要检查给定的点是否相同。如果是,则四边形不为零
- 然后,我们需要检查给定的4个点中的3个点中的任何一个是否共线。如果是,则四边形的个数= 0。检查程序以检查三个点是否共线,以检查三个点的共线性。
-
- 现在,对于有效的四边形,有两种可能性:
- 如果它是凸的四边形,则只有一个可能的四边形。
- 如果它是凹的四边形,则有3个可能的四边形。
这可以通过如何检查两个给定的线段是否相交来确定?对角线。
在凸四边形的情况下,对角线将相交,而在凹四边形的情况下,对角线将不相交。
由于我们不知道这些点的方向,因此我们无法具体确定对角线,因此无法确定四边形的所有不同线段(两个线段中没有公共点)并确定它们是否相交。
请参考该图以了解如何确定四边形的类型: 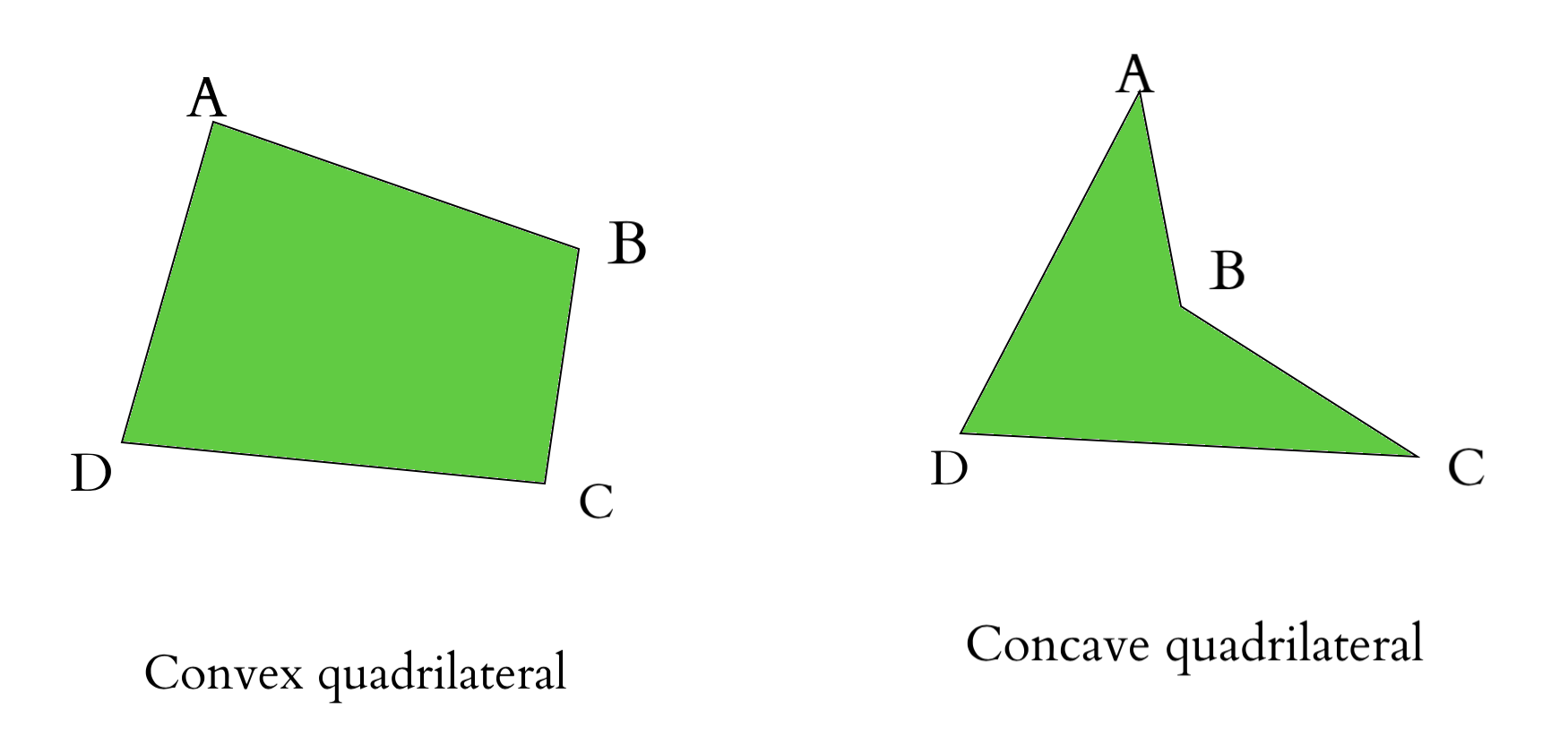
凸四边形:
line AB and line DC do not intersect
line AD and line BC do not intersect
line AC and line BD intersect
so total no of intersection= 1
凹四边形
line AB and line DC do not intersect
line AD and line BC do not intersect
line AC and line BD do not intersect
so total no of intersection= 0
如果没有交集= 1,则其为凸四边形,因此可能性= 1
如果没有交集= 0,则其为凹四边形,因此可能性= 3
C++
// C++ implementation of above approach
#include
using namespace std;
struct Point // points
{
int x;
int y;
};
// determines the orientation of points
int orientation(Point p, Point q, Point r)
{
int val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y);
if (val == 0)
return 0;
return (val > 0) ? 1 : 2;
}
// check whether the distinct line segments intersect
bool doIntersect(Point p1, Point q1, Point p2, Point q2)
{
int o1 = orientation(p1, q1, p2);
int o2 = orientation(p1, q1, q2);
int o3 = orientation(p2, q2, p1);
int o4 = orientation(p2, q2, q1);
if (o1 != o2 && o3 != o4)
return true;
return false;
}
// check if points overlap(similar)
bool similar(Point p1, Point p2)
{
// it is same, we are returning false because
// quadrilateral is not possible in this case
if (p1.x == p2.x && p1.y == p2.y)
return false;
// it is not same, So there is a
// possibility of a quadrilateral
return true;
}
// check for collinearity
bool collinear(Point p1, Point p2, Point p3)
{
int x1 = p1.x, y1 = p1.y;
int x2 = p2.x, y2 = p2.y;
int x3 = p3.x, y3 = p3.y;
// it is collinear, we are returning false
// because quadrilateral is not possible in this case
if ((y3 - y2) * (x2 - x1) == (y2 - y1) * (x3 - x2))
return false;
// it is not collinear, So there
// is a possibility of a quadrilateral
else
return true;
}
int no_of_quads(Point p1, Point p2, Point p3, Point p4)
{
// ** Checking for cases where no quadrilateral = 0 **
// check if any of the points are same
bool same = true;
same = same & similar(p1, p2);
same = same & similar(p1, p3);
same = same & similar(p1, p4);
same = same & similar(p2, p3);
same = same & similar(p2, p4);
same = same & similar(p3, p4);
// similar points exist
if (same == false)
return 0;
// check for collinearity
bool coll = true;
coll = coll & collinear(p1, p2, p3);
coll = coll & collinear(p1, p2, p4);
coll = coll & collinear(p1, p3, p4);
coll = coll & collinear(p2, p3, p4);
// points are collinear
if (coll == false)
return 0;
//** Checking for cases where no of quadrilaterals= 1 or 3 **
int check = 0;
if (doIntersect(p1, p2, p3, p4))
check = 1;
if (doIntersect(p1, p3, p2, p4))
check = 1;
if (doIntersect(p1, p2, p4, p3))
check = 1;
if (check == 0)
return 3;
return 1;
}
// Driver code
int main()
{
struct Point p1, p2, p3, p4;
// A =(0, 9), B = (-1, 0), C = (5, -1), D=(5, 9)
p1.x = 0, p1.y = 9;
p2.x = -1, p2.y = 0;
p3.x = 5, p3.y = -1;
p4.x = 5, p4.y = 9;
cout << no_of_quads(p1, p2, p3, p4) << endl;
// A=(0, 9), B=(-1, 0), C=(5, -1), D=(0, 3)
p1.x = 0, p1.y = 9;
p2.x = -1, p2.y = 0;
p3.x = 5, p3.y = -1;
p4.x = 0, p4.y = 3;
cout << no_of_quads(p1, p2, p3, p4) << endl;
// A=(0, 9), B=(0, 10), C=(0, 11), D=(0, 12)
p1.x = 0, p1.y = 9;
p2.x = 0, p2.y = 10;
p3.x = 0, p3.y = 11;
p4.x = 0, p4.y = 12;
cout << no_of_quads(p1, p2, p3, p4) << endl;
// A=(0, 9), B=(0, 9), C=(5, -1), D=(0, 3)
p1.x = 0, p1.y = 9;
p2.x = 0, p2.y = 9;
p3.x = 5, p3.y = -1;
p4.x = 0, p4.y = 3;
cout << no_of_quads(p1, p2, p3, p4) << endl;
return 0;
} Java
// Java implementation of above approach
class GFG
{
static class Point // points
{
int x;
int y;
}
// determines the orientation of points
static int orientation(Point p, Point q,
Point r)
{
int val = (q.y - p.y) * (r.x - q.x) -
(q.x - p.x) * (r.y - q.y);
if (val == 0)
return 0;
return (val > 0) ? 1 : 2;
}
// check whether the distinct
// line segments intersect
static boolean doIntersect(Point p1, Point q1,
Point p2, Point q2)
{
int o1 = orientation(p1, q1, p2);
int o2 = orientation(p1, q1, q2);
int o3 = orientation(p2, q2, p1);
int o4 = orientation(p2, q2, q1);
if (o1 != o2 && o3 != o4)
return true;
return false;
}
// check if points overlap(similar)
static boolean similar(Point p1, Point p2)
{
// it is same, we are returning
// false because quadrilateral is
// not possible in this case
if (p1.x == p2.x && p1.y == p2.y)
return false;
// it is not same, So there is a
// possibility of a quadrilateral
return true;
}
// check for collinearity
static boolean collinear(Point p1, Point p2,
Point p3)
{
int x1 = p1.x, y1 = p1.y;
int x2 = p2.x, y2 = p2.y;
int x3 = p3.x, y3 = p3.y;
// it is collinear, we are returning
// false because quadrilateral is not
// possible in this case
if ((y3 - y2) *
(x2 - x1) == (y2 - y1) *
(x3 - x2))
return false;
// it is not collinear, So there
// is a possibility of a quadrilateral
else
return true;
}
static int no_of_quads(Point p1, Point p2,
Point p3, Point p4)
{
// Checking for cases where
// no quadrilateral = 0
// check if any of the
// points are same
boolean same = true;
same = same & similar(p1, p2);
same = same & similar(p1, p3);
same = same & similar(p1, p4);
same = same & similar(p2, p3);
same = same & similar(p2, p4);
same = same & similar(p3, p4);
// similar points exist
if (same == false)
return 0;
// check for collinearity
boolean coll = true;
coll = coll & collinear(p1, p2, p3);
coll = coll & collinear(p1, p2, p4);
coll = coll & collinear(p1, p3, p4);
coll = coll & collinear(p2, p3, p4);
// points are collinear
if (coll == false)
return 0;
// Checking for cases where
// no of quadrilaterals= 1 or 3
int check = 0;
if (doIntersect(p1, p2, p3, p4))
check = 1;
if (doIntersect(p1, p3, p2, p4))
check = 1;
if (doIntersect(p1, p2, p4, p3))
check = 1;
if (check == 0)
return 3;
return 1;
}
// Driver code
public static void main(String args[])
{
Point p1, p2, p3, p4;
p1 = new Point();
p2 = new Point();
p3 = new Point();
p4 = new Point();
// A =(0, 9), B = (-1, 0),
// C = (5, -1), D=(5, 9)
p1.x = 0; p1.y = 9;
p2.x = -1; p2.y = 0;
p3.x = 5; p3.y = -1;
p4.x = 5; p4.y = 9;
System.out.println(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(-1, 0),
// C=(5, -1), D=(0, 3)
p1.x = 0; p1.y = 9;
p2.x = -1; p2.y = 0;
p3.x = 5; p3.y = -1;
p4.x = 0; p4.y = 3;
System.out.println(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(0, 10),
// C=(0, 11), D=(0, 12)
p1.x = 0; p1.y = 9;
p2.x = 0; p2.y = 10;
p3.x = 0; p3.y = 11;
p4.x = 0; p4.y = 12;
System.out.println(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(0, 9),
// C=(5, -1), D=(0, 3)
p1.x = 0; p1.y = 9;
p2.x = 0; p2.y = 9;
p3.x = 5; p3.y = -1;
p4.x = 0; p4.y = 3;
System.out.println(no_of_quads(p1, p2, p3, p4));
}
}
// This code is contributed
// by Arnab KunduC#
// C# implementation of above approach
using System;
class GFG
{
public class Point // points
{
public int x;
public int y;
}
// determines the orientation of points
static int orientation(Point p, Point q,
Point r)
{
int val = (q.y - p.y) * (r.x - q.x) -
(q.x - p.x) * (r.y - q.y);
if (val == 0)
return 0;
return (val > 0) ? 1 : 2;
}
// check whether the distinct
// line segments intersect
static bool doIntersect(Point p1, Point q1,
Point p2, Point q2)
{
int o1 = orientation(p1, q1, p2);
int o2 = orientation(p1, q1, q2);
int o3 = orientation(p2, q2, p1);
int o4 = orientation(p2, q2, q1);
if (o1 != o2 && o3 != o4)
return true;
return false;
}
// check if points overlap(similar)
static bool similar(Point p1, Point p2)
{
// it is same, we are returning
// false because quadrilateral is
// not possible in this case
if (p1.x == p2.x && p1.y == p2.y)
return false;
// it is not same, So there is a
// possibility of a quadrilateral
return true;
}
// check for collinearity
static bool collinear(Point p1, Point p2,
Point p3)
{
int x1 = p1.x, y1 = p1.y;
int x2 = p2.x, y2 = p2.y;
int x3 = p3.x, y3 = p3.y;
// it is collinear, we are returning
// false because quadrilateral is not
// possible in this case
if ((y3 - y2) *
(x2 - x1) == (y2 - y1) *
(x3 - x2))
return false;
// it is not collinear, So there
// is a possibility of a quadrilateral
else
return true;
}
static int no_of_quads(Point p1, Point p2,
Point p3, Point p4)
{
// Checking for cases where
// no quadrilateral = 0
// check if any of the
// points are same
bool same = true;
same = same & similar(p1, p2);
same = same & similar(p1, p3);
same = same & similar(p1, p4);
same = same & similar(p2, p3);
same = same & similar(p2, p4);
same = same & similar(p3, p4);
// similar points exist
if (same == false)
return 0;
// check for collinearity
bool coll = true;
coll = coll & collinear(p1, p2, p3);
coll = coll & collinear(p1, p2, p4);
coll = coll & collinear(p1, p3, p4);
coll = coll & collinear(p2, p3, p4);
// points are collinear
if (coll == false)
return 0;
// Checking for cases where
// no of quadrilaterals= 1 or 3
int check = 0;
if (doIntersect(p1, p2, p3, p4))
check = 1;
if (doIntersect(p1, p3, p2, p4))
check = 1;
if (doIntersect(p1, p2, p4, p3))
check = 1;
if (check == 0)
return 3;
return 1;
}
// Driver code
static void Main()
{
Point p1, p2, p3, p4;
p1 = new Point();
p2 = new Point();
p3 = new Point();
p4 = new Point();
// A =(0, 9), B = (-1, 0),
// C = (5, -1), D=(5, 9)
p1.x = 0; p1.y = 9;
p2.x = -1; p2.y = 0;
p3.x = 5; p3.y = -1;
p4.x = 5; p4.y = 9;
Console.WriteLine(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(-1, 0),
// C=(5, -1), D=(0, 3)
p1.x = 0; p1.y = 9;
p2.x = -1; p2.y = 0;
p3.x = 5; p3.y = -1;
p4.x = 0; p4.y = 3;
Console.WriteLine(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(0, 10),
// C=(0, 11), D=(0, 12)
p1.x = 0; p1.y = 9;
p2.x = 0; p2.y = 10;
p3.x = 0; p3.y = 11;
p4.x = 0; p4.y = 12;
Console.WriteLine(no_of_quads(p1, p2, p3, p4));
// A=(0, 9), B=(0, 9),
// C=(5, -1), D=(0, 3)
p1.x = 0; p1.y = 9;
p2.x = 0; p2.y = 9;
p3.x = 5; p3.y = -1;
p4.x = 0; p4.y = 3;
Console.WriteLine(no_of_quads(p1, p2, p3, p4));
}
}
// This code is contributed by mits输出:
1
3
0
0
如果您希望与行业专家一起参加现场课程,请参阅《 Geeks现场课程》和《 Geeks现场课程美国》。