人工智能发展非常迅速,并在 NASA 成功部署。 1999 年,远程特工带着深空 1 号乘坐银河系。 1999 年 5 月,一个名为 Remote Agent 的人工智能程序自主运行了深空 1 号飞船两天。远程代理系统应该管理这个航天器。如果发生故障,该远程代理系统将了解存在故障并进行纠正。这是基于人工智能的。
远程代理的目标是识别任何错误,然后纠正它们。远程代理使用基于模型的推理算法、目标导向规划和执行算法以及故障操作故障保护方法。
远程代理架构的特点:
- 它通过一组声明性和组合模型高度可编程。这称为基于模型的编程。
- 它以从几小时到数百毫秒的时间分辨率执行大量的机载推理和搜索。
- 它旨在提供高级闭环命令。
- 远程代理的工作:
远程代理由三个组件组成:
- Smart Executive 执行计划的活动。
- Planner 和 Scheduler生成可调整的计划,指定为实现任务目标而必须进行的基本活动。
- 模式识别和恢复以观察航天器的健康状况并尝试纠正发生的任何问题。
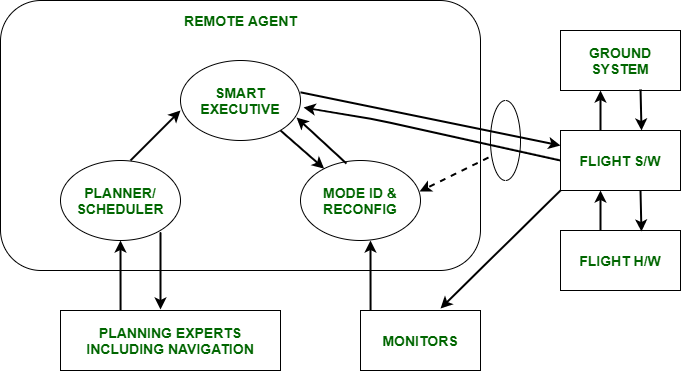
远程代理架构
- Smart Executive 向 Planning and Scheduler 请求计划。
- 计划由计划者和调度者在给定的时间段内生成
- Smart Executive 从 Planner 和 Scheduler 接收计划。
- Smart Executive 填写计划的细节并命令航天器系统采取必要的行动。
- 航天器的状态由模式识别和恢复持续监控。它检测故障并建议恢复操作。
- Smart Executive 执行恢复操作或从 Planner 和 Scheduler 请求一个新计划,该计划将考虑到故障。
太空任务使用的远程代理将能够探索我们的通信系统无法到达的区域,更可靠、更便宜,并且可以运行航天器的许多基本活动。设计远程代理以协助在太空中构建虚拟存在的挑战已被证明是人工智能的一个有趣且独特的机会。远程代理的组件借鉴了人工智能多个领域的研究成果。包括搜索、时间推理、约束传播、计划和调度、反应式语言、计划执行、维护、推理和基于模型的诊断。
自动驾驶汽车
自动驾驶汽车是一种能够识别其环境并在无人参与的情况下运行的车辆。这些汽车集成了各种传感器来识别它们的环境,例如激光雷达、雷达、GPS、声纳和初始测量单位。
2005 年 Darpa 大挑战
大挑战是由国防高级研究计划局发起的,旨在刺激无人地面车辆导航的创新。 Darpa Grand Challenge 是自动驾驶汽车长途旅行的第一个工作演示。包括斯坦利在内的四辆自动驾驶汽车在规定的 10 小时限制内成功完成了 132 英里的沙漠路线。 DARPA 创造了一项挑战,即内华达州的纳瓦霍沙漠 132 英里(约 212 公里)将由这些无人驾驶汽车在没有手动控制的情况下行驶。来自加利福尼亚的斯坦福赛车队赢得了斯坦利汽车的比赛。
斯坦利:2005 年赢得 DARPA 大挑战的自动驾驶汽车
Stanley 开发过程中的主要技术挑战是设计一个高度可靠的系统,能够在各种非结构化越野环境中以极高的速度行驶,并以高精度完成所有这些工作。这些要求导致了自主导航领域的各种进步。
在远距离地形感知、实时防撞以及在湿滑和崎岖地形上稳定车辆控制等领域,开发了多种方法,并扩展了现有方法。许多这些发展是由速度要求驱动的,这使得越野驾驶领域的许多传统技术不适用。在追求这些发展的过程中,该团队引入了来自各个领域的算法,包括分布式系统、机器学习和概率机器人。
斯坦利设计的一个重要特征是保留街道合法性,以便人类驾驶员可以像传统乘用车一样安全地操作机器人。 Stanley 的自定义用户界面使驾驶员能够随意启用和脱离计算机系统,即使在汽车行驶中也是如此。因此,驾驶员可以在开发过程中随时禁用计算机控制,并重新获得对车辆的手动控制。机器学习在比赛前和比赛中的普遍应用,使斯坦利变得精确而稳健。
2007 年 Darpa 城市挑战赛
城市挑战赛基本上是关于智能软件的。无人驾驶汽车必须在不到六个小时内在有人的城市街道和道路上行驶。必须遵守所有交通规则和规定,参赛者被分成两条赛道。要求自动驾驶汽车具备在道路上行驶时遵守交通规则、清扫路口、与流动的交通、停车和自动处理异常情况等智能能力。 Tartan Racing 车队的汽车 Boss 赢得了比赛并获得了 200 万美元的奖金。这是无人驾驶汽车第一次在市区与有人和无人驾驶车辆进行交互。
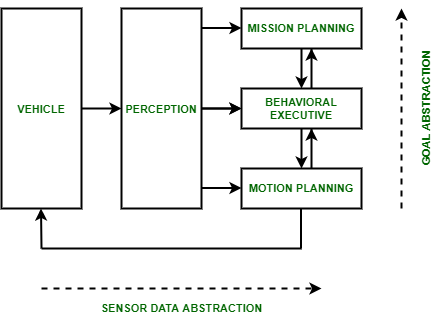
BOSS 软件架构