- 雷达系统-雷达类型
- 雷达系统-连续波雷达(1)
- 雷达系统-连续波雷达
- 雷达系统-跟踪雷达
- 雷达系统-跟踪雷达(1)
- 雷达系统-雷达天线(1)
- 雷达系统-雷达天线
- 雷达系统-雷达显示器
- 雷达系统-雷达显示器(1)
- 雷达系统-FMCW雷达(1)
- 雷达系统-FMCW雷达
- 雷达系统教程
- 雷达系统教程(1)
- 讨论雷达系统(1)
- 讨论雷达系统
- 雷达系统-概述(1)
- 雷达系统-概述
- 如何在 R 中创建雷达图?
- 如何在 R 中创建雷达图?(1)
- 连续波雷达 (1)
- 雷达系统-有用的资源(1)
- 雷达系统-有用的资源
- 连续波雷达 - 无论代码示例
- 雷达系统-距离方程
- 雷达系统-距离方程(1)
- 雷达系统-天线参数(1)
- 雷达系统-天线参数
- Excel图表-雷达图(1)
- Excel图表-雷达图
📅 最后修改于: 2020-11-23 05:02:32 🧑 作者: Mango
如果将雷达用于检测可移动目标,则由于该可移动目标,雷达应仅接收回波信号。该回声信号是所需的。但是,在实际应用中,雷达除了接收由于该可移动目标引起的回波信号之外,还接收由于静止物体引起的回波信号。
由于诸如陆地和海洋之类的静止物体(场所)而产生的回波信号被称为杂波,因为它们是不想要的信号。因此,我们必须选择雷达,使其仅考虑由于可移动目标而产生的回波信号,而不考虑杂波。
为此,雷达使用多普勒效应原理将非静止目标与静止物体区分开。这种类型的雷达称为“移动目标指示器雷达”或简称为“ MTI雷达” 。
根据多普勒效应,如果目标朝雷达方向移动,则接收信号的频率将增加。类似地,如果目标远离雷达,接收信号的频率将降低。
MTI雷达的类型
根据使用的发射机类型,我们可以将MTI雷达分为以下两种类型。
- 带功率放大器发射器的MTI雷达
- 带功率振荡器的MTI雷达
现在,让我们一一讨论这两个MTI雷达。
带功率放大器发射器的MTI雷达
MTI雷达借助双工器将单个天线用于信号的发送和接收。下图显示了带功率放大器发射器的MTI雷达的框图。
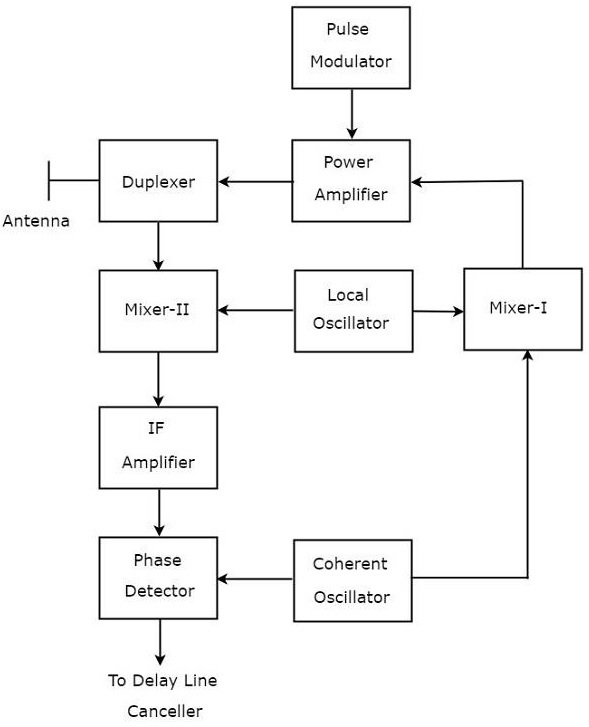
带有功率放大器发射器的MTI Radar的每个模块的函数在下面提到。
-
脉冲调制器-产生脉冲调制信号,并将其应用于功率放大器。
-
功率放大器-放大脉冲调制信号的功率电平。
-
本地振荡器-产生具有稳定频率$ f_1的信号。因此,它也被称为稳定的本地振荡器。本地振荡器的输出同时应用于Mixer-I和Mixer-II。
-
相干振荡器-它产生一个具有中频$ f_c $的信号。该信号用作参考信号。相干振荡器的输出同时应用于混频器-I和鉴相器。
-
混频器-混频器可以产生应用于其的频率之和或差。具有频率$ f_1 $和$ f_c $的信号被施加到混频器I。这里,混频器-I用于产生输出,其频率为$ f_1 + f_c $。
-
双工器-这是一个微波开关,根据需要将天线连接到发射器部分或接收器部分。当双工器将天线连接到功率放大器时,天线发送频率为$ f_1 + f_c $的信号。类似地,当双工器将天线连接到混频器-II时,天线会接收到频率为$ f_1 + f_c \ pm f_d $的信号。
-
Mixer-II-混频器可以产生应用于其的频率之和或差。具有频率$ f_1 + f_c \ pm f_d $和$ f_1 $的信号被施加到混频器II。在这里,混频器-II用于产生输出,其输出频率为$ f_c \ pm f_d $。
-
IF放大器-IF放大器放大中频(IF)信号。图中所示的IF放大器放大具有频率$ f_c + f_d $的信号。该放大的信号被用作相位检测器的输入。
鉴相器-用于从施加的两个输入信号中产生具有频率$ f_d $的输出信号,这两个输入信号的频率分别为$ f_c + f_d $和$ f_c $。鉴相器的输出可以连接到延迟线消除器。
带功率振荡器的MTI雷达
带有功率振荡器发射器的MTI雷达的框图看起来与带有功率放大器发射器的MTI雷达的框图相似。在两个框图中,与接收器部分相对应的块将相同。然而,在两个框图中,与发送器部分相对应的块可以不同。
下图显示了带有功率振荡器发送器的MTI雷达的框图。
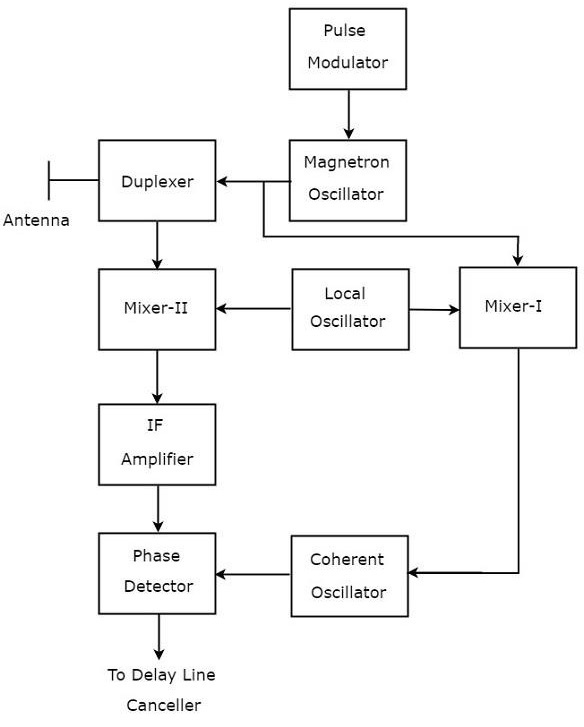
如图所示,MTI Radar在Duplexer的帮助下将单个天线用于信号的发送和接收。 MTI雷达与功率振荡器发射器的操作如下所述。
-
磁控管振荡器的输出和本地振荡器的输出应用于Mixer-I。这将进一步产生一个IF信号,该IF的相位与发射信号的相位直接相关。
-
混频器I的输出施加到相干振荡器。因此,相干振荡器输出的相位将被锁定为IF信号的相位。这意味着,相干振荡器输出的相位也将直接与发射信号的相位相关。
-
因此,相干振荡器的输出可用作参考信号,以使用相位检测器将接收到的回波信号与相应的发送信号进行比较。
对于每个新发送的信号,将重复执行上述任务。