- 雷达系统-雷达类型(1)
- 雷达系统-雷达类型
- 雷达系统-连续波雷达
- 雷达系统-连续波雷达(1)
- 耙式接收器(1)
- 耙式接收器
- 雷达系统-跟踪雷达
- 雷达系统-跟踪雷达(1)
- 雷达系统-雷达天线(1)
- 雷达系统-雷达天线
- 雷达系统教程
- 雷达系统教程(1)
- 雷达系统-雷达显示器
- 雷达系统-雷达显示器(1)
- 讨论雷达系统(1)
- 讨论雷达系统
- 雷达系统-概述
- 雷达系统-概述(1)
- 雷达系统-FMCW雷达
- 雷达系统-FMCW雷达(1)
- 雷达系统-MTI雷达
- 雷达系统-有用的资源
- 雷达系统-有用的资源(1)
- 雷达系统-距离方程
- 雷达系统-距离方程(1)
- 雷达系统-天线参数
- 雷达系统-天线参数(1)
- 如何在 R 中创建雷达图?(1)
- 如何在 R 中创建雷达图?
📅 最后修改于: 2020-11-23 05:05:11 🧑 作者: Mango
如果滤波器以使其输出峰值功率与频率响应中的平均噪声功率之比最大化的方式产生输出,则该滤波器称为匹配滤波器。
这是一个重要的标准,在设计任何雷达接收器时都应予以考虑。在本章中,让我们讨论匹配滤波器的频率响应函数和匹配滤波器的脉冲响应。
匹配滤波器的频率响应功能
匹配滤波器的频率响应将与输入信号频谱的复共轭成比例。数学上,我们可以将匹配滤波器的频率响应函数$ H \ left(f \ right)$的表达式写为-
$$ H \ left(f \ right)= G_aS ^ \ ast \ left(f \ right)e ^ {-j2 \ pi ft_1} \:\:\:\:\:\ Equation \:1 $$
哪里,
$ G_a $是匹配滤波器的最大增益
$ S \ left(f \ right)$是输入信号的傅立叶变换,$ s \ left(t \ right)$
$ S ^ \ ast \ left(f \ right)$是$ S \ left(f \ right)$的复共轭
$ t_1 $是信号观测到的最大时刻
通常,$ G_a $的值被视为1。通过将$ G_a = 1 $代入方程式1,我们将得到以下方程式。
$$ H \ left(f \ right)= S ^ \ ast \ left(f \ right)e ^ {-j2 \ pi ft_1} \:\:\:\:\:Equation \:2 $$
匹配滤波器的频率响应函数$ H \ left(f \ right)$的大小为$ S ^ \ ast \ left(f \ right)$,相位角为$ e ^ {-j2 \ pi ft_1 } $,随频率均匀变化。
匹配滤波器的脉冲响应
在时域中,我们将通过应用频率响应函数$ H(f)$的傅立叶逆变换来获得匹配滤波器接收器的输出$ h(t)$。
$$ h \ left(t \ right)= \ int _ {-\ infty} ^ {\ infty} H \ left(f \ right)e ^ {-j2 \ pi ft_1} df \:\:\:\:\\ :等式\:3 $$
将公式1代入公式3。
$$ h \ left(t \ right)= \ int _ {-\ infty} ^ {\ infty} \ lbrace G_aS ^ \ ast \ left(f \ right)e ^ {-j2 \ pi ft_1} \ rbrace e ^ { j2 \ pi ft} df $$
$$ \ Rightarrow h \ left(t \ right)= \ int _ {-\ infty} ^ {\ infty} G_aS ^ \ ast \ left(f \ right)e ^ {-j2 \ pi f \ left(t_1-t \ right)} df \:\:\:\:\:Equation \:4 $$
我们知道以下关系。
$$ S ^ \ ast \ left(f \ right)= S \ left(-f \ right)\:\:\:\:\:Equation \:5 $$
用公式4代替公式5。
$$ h \ left(t \ right)= \ int _ {-\ infty} ^ {\ infty} G_aS(-f)e ^ {-j2 \ pi f \ left(t_1-t \ right)} df $$
$$ \ Rightarrow h \ left(t \ right)= \ int _ {-infty} ^ {\ infty} G_aS ^ \ left(f \ right)e ^ {j2 \ pi f \ left(t_1-t \ right) } df $$
$$ \ Rightarrow h \ left(t \ right)= G_as(t_1−t)\:\:\:\:\:Equation \:6 $$
通常,$ G_a $的值被视为1。通过将$ G_a = 1 $代入公式6,我们将得到以下公式。
$$ h(t)= s \ left(t_1-t \ right)$$
上面的等式证明,匹配滤波器的脉冲响应是在大约时刻$ t_1 $处接收信号的镜像。下图说明了此概念。
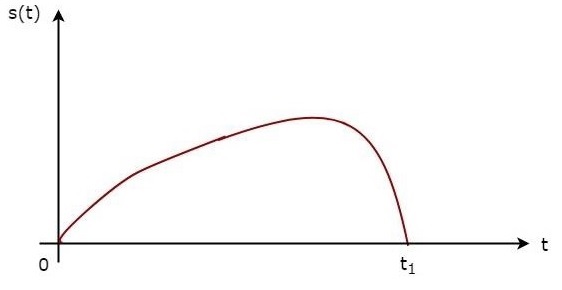
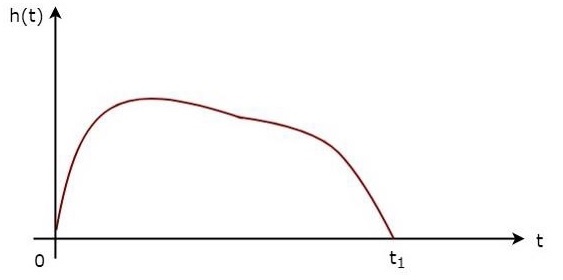
显示了接收到的信号$ s \ left(t \ right)$和与信号相对应的匹配滤波器$ s \ left(t \ right)$的脉冲响应$ s \ left(t \ right)$在上图中。