- SSBSC解调器(1)
- SSBSC解调器
- 模拟通信-DSBSC调制
- 模拟通信-DSBSC调制(1)
- 模拟通信-AM解调器
- 模拟通信-AM解调器(1)
- 模拟通信-DSBSC调制器(1)
- 模拟通信-DSBSC调制器
- 模拟通信-FM解调器(1)
- 模拟通信-FM解调器
- 给定2D数组中的最小和子矩阵
- 从0到N的连续数字的汉明差总和|套装2
- 可以刻在矩形中的最大可能的圆
- 检查是否可以通过与上一跳重复多次,少跳一次或相同数目的索引重复跳转来到达已排序数组的末尾
- 如何在python代码示例中打印字符串
- Python – GTK+ 3 中的网格容器
- python 跟踪表 - Python 代码示例
- 检查数组的素数元素的和是否为素数
- ruby 数组减数组 - Ruby 代码示例
- 在 termux 中安装 msf - Shell-Bash 代码示例
- Python|提取过滤的字典值
- html 文本框 - Html 代码示例
- 素数的递归程序
- &-Tex命令(1)
- depmod:未找到 - Shell-Bash 代码示例
- fidget spinner online - 任何代码示例
- 国际空间研究组织 | ISRO CS 2011 |问题 17
- 不等于 java 代码示例
- DXC技术面试体验(校内)
📅 最后修改于: 2020-11-26 09:53:09 🧑 作者: Mango
从DSBSC波中提取原始消息信号的过程称为DSBSC的检测或解调。以下解调器(检测器)用于解调DSBSC波。
- 相干探测器
- Costas Loop
相干探测器
在此,使用相同的载波信号(用于生成DSBSC信号)来检测消息信号。因此,这种检测过程称为相干或同步检测。以下是相干检测器的框图。
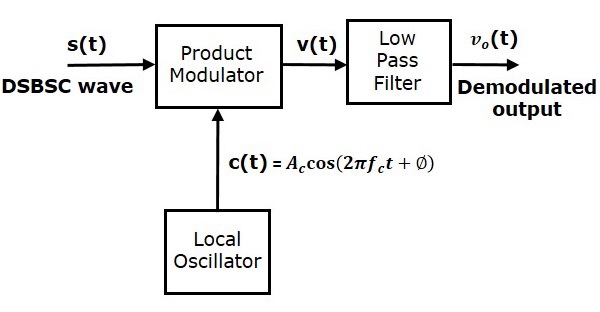
在此过程中,可以通过将消息信号与DSBSC调制中使用的载波具有相同频率和相位的载波相乘,从DSBSC波中提取消息信号。然后,所得信号通过低通滤波器。该滤波器的输出是所需的消息信号。
让DSBSC波成为
$$ s \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)m \ left(t \ right)$$
本机振荡器的输出为
$$ c \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct + \ phi \ right)$$
其中,\\ phi $是本地振荡器信号和载波信号之间的相位差,用于DSBSC调制。
从图中,我们可以将乘积调制器的输出写为
$$ v \ left(t \ right)= s \ left(t \ right)c \ left(t \ right)$$
用上述公式中的$ s \ left(t \ right)$和$ c \ left(t \ right)$值代替。
$$ \ Rightarrow v \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)m \ left(t \ right)A_c \ cos \ left(2 \ pi f_ct + \ phi \ right) $$
$ = {A_ {c}} ^ {2} \ cos \ left(2 \ pi f_ct \ right)\ cos \ left(2 \ pi f_ct + \ phi \ right)m \ left(t \ right)$
$ = \ frac {{A_ {c}} ^ {2}} {2} \ left [\ cos \ left(4 \ pi f_ct + \ phi \ right)+ \ cos \ phi \ right] m \ left(t \右)$
$$ v \ left(t \ right)= \ frac {{A_ {c}} ^ {2}} {2} \ cos \ phi m \ left(t \ right)+ \ frac {{A_ {c}} ^ {2}} {2} \ cos \ left(4 \ pi f_ct + \ phi \ right)m \ left(t \ right)$$
在上式中,第一项是消息信号的缩放版本。可以通过将上述信号通过低通滤波器将其提取出来。
因此,低通滤波器的输出为
$$ v_0t = \ frac {{A_ {c}} ^ {2}} {2} \ cos \ phi m \ left(t \ right)$$
当$ \ phi = 0 ^ 0 $时,解调信号幅度将最大。这就是为什么本地振荡器信号和载波信号应同相的原因,即,这两个信号之间不应有任何相位差。
当$ \ phi = \ pm 90 ^ 0 $时,解调信号幅度将为零。这种效应称为正交零效应。
Costas Loop
Costas回路用于使载波信号(用于DSBSC调制)和本地生成的信号同相。以下是Costas循环的框图。
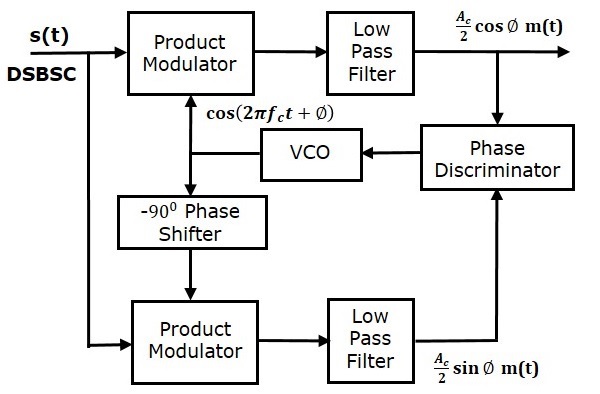
Costas环路由两个具有公共输入$ s \ left(t \ right)$的乘积调制器组成,这是DSBSC波。两个产品调制器的另一个输入取自相移为-90 ^ 0 $的压控振荡器(VCO)至产品调制器之一,如图所示。
我们知道DSBSC波的方程是
$$ s \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)m \ left(t \ right)$$
令VCO的输出为
$$ c_1 \ left(t \ right)= \ cos \ left(2 \ pi f_ct + \ phi \ right)$$
VCO的此输出用作上乘积调制器的载波输入。
因此,上乘积调制器的输出为
$$ v_1 \ left(t \ right)= s \ left(t \ right)c_1 \ left(t \ right)$$
替换上式中的$ s \ left(t \ right)$和$ c_1 \ left(t \ right)$值。
$$ \ Rightarrow v_1 \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)m \ left(t \ right)\ cos \ left(2 \ pi f_ct + \ phi \ right)$ $
简化后,我们将获得$ v_1 \ left(t \ right)$作为
$$ v_1 \ left(t \ right)= \ frac {A_c} {2} \ cos \ phi m \ left(t \ right)+ \ frac {A_c} {2} \ cos \ left(4 \ pi f_ct + \ phi \ right)m \ left(t \ right)$$
该信号被用作上部低通滤波器的输入。该低通滤波器的输出为
$$ v_ {01} \ left(t \ right)= \ frac {A_c} {2} \ cos \ phi m \ left(t \ right)$$
因此,该低通滤波器的输出是调制信号的缩放版本。
$ -90 ^ 0 $移相器的输出为
$$ c_2 \ left(t \ right)= cos \ left(2 \ pi f_ct + \ phi-90 ^ 0 \ right)= \ sin \ left(2 \ pi f_ct + \ phi \ right)$$
该信号用作下乘积调制器的载波输入。
下乘积调制器的输出为
$$ v_2 \ left(t \ right)= s \ left(t \ right)c_2 \ left(t \ right)$$
用上式中的$ s \ left(t \ right)$和$ c_2 \ left(t \ right)$值代替。
$$ \ Rightarrow v_2 \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)m \ left(t \ right)\ sin \ left(2 \ pi f_ct + \ phi \ right)$ $
简化后,我们将获得$ v_2 \ left(t \ right)$作为
$$ v_2 \ left(t \ right)= \ frac {A_c} {2} \ sin \ phi m \ left(t \ right)+ \ frac {A_c} {2} \ sin \ left(4 \ pi f_ct + \ phi \ right)m \ left(t \ right)$$
该信号被用作较低的低通滤波器的输入。该低通滤波器的输出为
$$ v_ {02} \ left(t \ right)= \ frac {A_c} {2} \ sin \ phi m \ left(t \ right)$$
该低通滤波器的输出与上层低通滤波器的输出具有-90 ^ 0 $的相位差。
这两个低通滤波器的输出用作鉴相器的输入。根据这两个信号之间的相位差,鉴相器会产生一个直流控制信号。
该信号用作VCO的输入,以校正VCO输出中的相位误差。因此,载波信号(用于DSBSC调制)和本地生成的信号(VCO输出)同相。