人工智能和机器人技术中的映射技术
在人工智能和机器人技术中,机器人需要地图来判断其空间环境。地图只不过是机器人周围的空间维度,是其运动所必需的。它是 SLAM(同时定位和映射)过程的一部分。
SLAM 同时结合了机器人的定位和环境的映射。它是决定机器人活动的重要特征,也是用于强化学习的概念;环境是动态的,系统必须快速适应变化。
SLAM 问题通常被称为鸡和蛋问题。因为我们总是在两难中选择是在地图之前定位机器人还是反之。
有3种类型的地图;即感官地图、拓扑地图和几何地图
地图类型
感官地图:
机器人使用传感器感知环境。此类地图是基于质量和准确性的环境的直接表示。机器人技术将测量与里程信息相结合,并使用伺服控制等技术或识别传感器响应的特征来导航地图。当机器人在整个环境中移动时,它会收集传感器读数,我们将获得这些测量值
[I(xi, Yi, theta)] 我收集的连续近似值。机器人创建了一个类似图形的位置表示,其边缘与交叉点匹配。描述基于视觉景观和机器人的左右方向。
拓扑图:
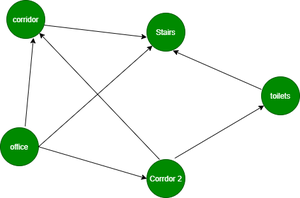
拓扑图
长的度量图很难维护,一个替代方案是基于图的拓扑图;其中节点代表地点,边代表弧线/路径。
该图由
G =(V, E)
- 由 V = (V1, V2 … VN) 表示的顶点维护
- 由 E = (e1, e2, e3 ... en) 表示的边
Vi 和 Vj 的顺序很重要,因为它是有向图,并且假设单个路径中的路径由顺序表示。
图的顶点是使多个函数的最佳值的位置。为了使图与实际空间的映射更紧密地联系起来,可以将边的描述放大一点,以明确要求边在每个图的最高点出现的顺序。
例如,TOTO 机器人在发现其世界时使用拓扑图,当发现地标时,它们会在图中与定性资源(如左墙、右墙、走廊和指南针行为)相互发展成节点。
准确性维护过程增加了对相似地标不会成为图中的多个节点的保证,因此这种方法显示了拓扑映射的必要因素。
几何图:
几何地图是组织良好的环境信息,因为它们由坐标表示。对未知环境的检查导致几何图来自发现和相关问题,这些问题主要在计算几何领域进行研究。他们对噪音很敏感。每个地图对象都呈放射状连接,以形成开放空间的图像。径向多边形用于定位,机器人使用空间。
几何地图可能是自主机器人中最常用的地图类型。因此,独立映射中的大量工作依赖于获取几何图也就不足为奇了。