- 人工智能(1)
- 人工智能
- 人工智能——恩或祸
- 人工智能——恩或祸(1)
- unity agent 不动 - C# (1)
- unity agent 不动 - C# 代码示例
- 人工智能-问题
- 人工智能-问题(1)
- 人工智能的类型(1)
- 人工智能的类型
- AI中Agent类型
- AI中Agent类型(1)
- 安装 ssh-agent - Shell-Bash 代码示例
- 运行 ssh-agent - Shell-Bash (1)
- 运行 ssh-agent - Shell-Bash 代码示例
- 人工智能教程(1)
- 人工智能教程(1)
- 人工智能教程
- 人工智能教程
- 人工智能的出现
- eval ssh-agent (1)
- 人工智能应用
- 人工智能应用(1)
- Node.js new Agent() 方法
- Node.js new Agent() 方法(1)
- 人工智能游戏
- 讨论人工智能(1)
- 讨论人工智能
- 人工智能环境
📅 最后修改于: 2020-09-23 08:36:51 🧑 作者: Mango
人工智能代理商
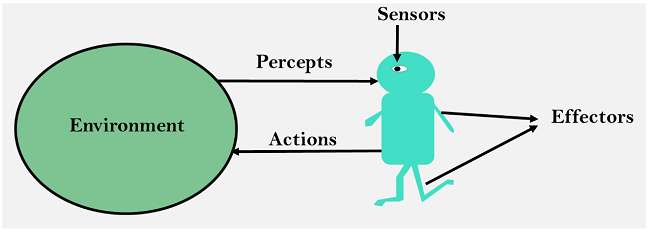
可以将AI系统定义为对理性主体及其环境的研究。代理通过传感器感知环境,并通过执行器对环境进行作用。AI代理可以具有心理属性,例如知识,信念,意图等。
什么是代理?
代理可以是通过传感器感知环境并通过执行器对环境起作用的任何事物。特工以感知,思考和行动的周期运行。代理可以是:
- 人工代理:人工代理具有眼睛,耳朵和其他器官,它们可用于传感器,手,腿,声道可用于执行器。
- 机器人代理:机器人代理可以具有摄像头,红外测距仪,用于传感器的NLP和用于执行器的各种电机。
- 软件代理:软件代理可以具有击键,文件内容作为感觉输入,并且可以作用于这些输入并在屏幕上显示输出。
因此,我们周围的世界充满了恒温器,手机,相机等代理商,甚至我们也是代理商。
在继续前进之前,我们应该首先了解传感器,效应器和执行器。
传感器:传感器是一种检测环境变化并将信息发送到其他电子设备的设备。代理通过传感器观察其环境。
执行器:执行器是将能量转换为运动的机器的组成部分。执行器仅负责移动和控制系统。致动器可以是电动机,齿轮,导轨等。
效应器:效应器是影响环境的设备。效应器可以是腿,轮子,手臂,手指,翅膀,鳍和显示屏。
智能代理:
智能代理是一个自治实体,它使用传感器和执行器对环境起作用以实现目标。聪明的代理人可以向环境学习,以实现自己的目标。恒温器是智能代理的一个示例。
以下是AI代理的四个主要规则:
- 规则1: AI代理必须具有感知环境的能力。
- 规则2:必须使用观察来做出决定。
- 规则3:决定应采取行动。
- 规则4: AI代理采取的行动必须是理性的行动。
Rational Agent:
理性主体是具有明确偏好,对不确定性进行建模并以所有可能动作最大化其绩效指标的方式起作用的主体。
据说理性的代理人会执行正确的事情。人工智能是关于创建理性主体以用于各种现实情况的博弈论和决策论。
对于AI代理来说,合理的行为最为重要,因为在AI强化学习算法中,对于每个可能的最佳动作,代理都会获得正向奖励,对于每个错误的动作,代理都会得到负向奖励。
注意:AI中的Rational代理与智能代理非常相似。
理性:
代理的合理性通过其绩效指标来衡量。可以根据以下几点判断合理性:
- 定义成功标准的绩效指标。
- 代理对其环境的先验知识。
- 代理可以执行的最佳操作。
- 感知顺序。
注意:理性与Omniscience不同,因为Omniscient代理知道其行动的实际结果并采取相应的行动,这在现实中是不可能的。
AI代理的结构
AI的任务是设计一个实现代理函数的代理程序。智能代理的结构是体系结构和代理程序的组合。它可以被视为:
Agent = Architecture + Agent program 以下是AI代理结构中涉及的三个主要术语:
体系结构:体系结构是AI代理执行的机器。
代理功能:代理函数用于将感知映射到动作。
f:P* → A 代理程序:代理程序是代理函数的实现。代理程序在物理体系结构上执行以产生函数f。
PEAS代表
PEAS是AI代理赖以工作的一种模型。当我们定义AI代理或理性代理时,可以将其属性归类为PEAS表示模型。它由四个词组成:
- P:绩效指标
- E:环境
- A:执行器
- S:传感器
此处的绩效指标是代理行为成功的目标。
自动驾驶汽车的PEAS:

假设自动驾驶汽车的PEAS表示为:
表现:安全,时间,合法驾驶,舒适
环境:道路,其他车辆,路标,行人
执行器:转向,油门,刹车,信号,喇叭
传感器:相机,GPS,速度计,里程表,加速度计,声纳。
具有PEAS代表的座席示例
| Agent | Performance measure | Environment | Actuators | Sensors |
|---|---|---|---|---|
| 1. Medical Diagnose |
|
|
|
Keyboard (Entry of symptoms) |
| 2. Vacuum Cleaner |
|
|
|
|
| 3. Part -picking Robot |
|
|
|
|