本文重点介绍使用算法来求解线性方程组。我们将处理系数矩阵。高斯消除不适用于奇异矩阵(它们导致被零除)。
Input: For N unknowns, input is an augmented
matrix of size N x (N+1). One extra
column is for Right Hand Side (RHS)
mat[N][N+1] = {{3.0, 2.0,-4.0, 3.0},
{2.0, 3.0, 3.0, 15.0},
{5.0, -3, 1.0, 14.0}
};
Output: Solution to equations is:
3.000000
1.000000
2.000000
Explanation:
Given matrix represents following equations
3.0X1 + 2.0X2 - 4.0X3 = 3.0
2.0X1 + 3.0X2 + 3.0X3 = 15.0
5.0X1 - 3.0X2 + X3 = 14.0
There is a unique solution for given equations,
solutions is, X1 = 3.0, X2 = 1.0, X3 = 2.0, 
行梯形形式:如果满足以下条件,则称矩阵在ref中:
- 每行中的第一个非零元素(称为前导系数)为1。
- 每个前导系数位于前一行前导系数右侧的一列中。
- 具有全零的行位于具有至少一个非零元素的行的下方。
简化的行梯形形式:如果满足以下条件,则称矩阵在rref中–
- 所有参考条件
- 每行中的前导系数是其列中唯一的非零条目。
该算法主要是关于在矩阵的行上执行一系列操作。在执行这些操作时,我们要记住的是,我们希望将矩阵转换为行梯形形式的上三角矩阵。操作可以是:
- 交换两行
- 将行乘以非零标量
- 在一行中添加另一行的倍数
流程:
- 向前淘汰:减少为行梯队形式。使用它可以判断是否有解决方案,唯一解决方案或无限多个解决方案。
- 反向替代:进一步还原为行列梯形形式。
算法:
- 部分枢轴:通过交换行来查找第k个枢轴,以将绝对值最大的条目移动到枢轴位置。这使算法具有计算稳定性。
- 对于枢轴下方的每一行,计算使第k个条目为零的因子f,并为该行中的每个元素减去第k行中相应元素的f倍。
- 对每个未知重复上述步骤。我们将剩下部分参考矩阵。
下面是上述算法的实现。
C++
// C++ program to demonstrate working of Guassian Elimination
// method
#include
using namespace std;
#define N 3 // Number of unknowns
// function to reduce matrix to r.e.f. Returns a value to
// indicate whether matrix is singular or not
int forwardElim(double mat[N][N+1]);
// function to calculate the values of the unknowns
void backSub(double mat[N][N+1]);
// function to get matrix content
void gaussianElimination(double mat[N][N+1])
{
/* reduction into r.e.f. */
int singular_flag = forwardElim(mat);
/* if matrix is singular */
if (singular_flag != -1)
{
printf("Singular Matrix.\n");
/* if the RHS of equation corresponding to
zero row is 0, * system has infinitely
many solutions, else inconsistent*/
if (mat[singular_flag][N])
printf("Inconsistent System.");
else
printf("May have infinitely many "
"solutions.");
return;
}
/* get solution to system and print it using
backward substitution */
backSub(mat);
}
// function for elementary operation of swapping two rows
void swap_row(double mat[N][N+1], int i, int j)
{
//printf("Swapped rows %d and %d\n", i, j);
for (int k=0; k<=N; k++)
{
double temp = mat[i][k];
mat[i][k] = mat[j][k];
mat[j][k] = temp;
}
}
// function to print matrix content at any stage
void print(double mat[N][N+1])
{
for (int i=0; i v_max)
v_max = mat[i][k], i_max = i;
/* if a prinicipal diagonal element is zero,
* it denotes that matrix is singular, and
* will lead to a division-by-zero later. */
if (!mat[k][i_max])
return k; // Matrix is singular
/* Swap the greatest value row with current row */
if (i_max != k)
swap_row(mat, k, i_max);
for (int i=k+1; i= 0; i--)
{
/* start with the RHS of the equation */
x[i] = mat[i][N];
/* Initialize j to i+1 since matrix is upper
triangular*/
for (int j=i+1; j Java
// Java program to demonstrate working of Guassian Elimination
// method
import java.io.*;
class GFG
{
public static int N = 3; // Number of unknowns
// function to get matrix content
static void gaussianElimination(double mat[][])
{
/* reduction into r.e.f. */
int singular_flag = forwardElim(mat);
/* if matrix is singular */
if (singular_flag != -1)
{
System.out.println("Singular Matrix.");
/* if the RHS of equation corresponding to
zero row is 0, * system has infinitely
many solutions, else inconsistent*/
if (mat[singular_flag][N] != 0)
System.out.print("Inconsistent System.");
else
System.out.print(
"May have infinitely many solutions.");
return;
}
/* get solution to system and print it using
backward substitution */
backSub(mat);
}
// function for elementary operation of swapping two
// rows
static void swap_row(double mat[][], int i, int j)
{
// printf("Swapped rows %d and %d\n", i, j);
for (int k = 0; k <= N; k++)
{
double temp = mat[i][k];
mat[i][k] = mat[j][k];
mat[j][k] = temp;
}
}
// function to print matrix content at any stage
static void print(double mat[][])
{
for (int i = 0; i < N; i++, System.out.println())
for (int j = 0; j <= N; j++)
System.out.print(mat[i][j]);
System.out.println();
}
// function to reduce matrix to r.e.f.
static int forwardElim(double mat[][])
{
for (int k = 0; k < N; k++)
{
// Initialize maximum value and index for pivot
int i_max = k;
int v_max = (int)mat[i_max][k];
/* find greater amplitude for pivot if any */
for (int i = k + 1; i < N; i++)
if (Math.abs(mat[i][k]) > v_max)
{
v_max = (int)mat[i][k];
i_max = i;
}
/* if a prinicipal diagonal element is zero,
* it denotes that matrix is singular, and
* will lead to a division-by-zero later. */
if (mat[k][i_max] == 0)
return k; // Matrix is singular
/* Swap the greatest value row with current row
*/
if (i_max != k)
swap_row(mat, k, i_max);
for (int i = k + 1; i < N; i++)
{
/* factor f to set current row kth element
* to 0, and subsequently remaining kth
* column to 0 */
double f = mat[i][k] / mat[k][k];
/* subtract fth multiple of corresponding
kth row element*/
for (int j = k + 1; j <= N; j++)
mat[i][j] -= mat[k][j] * f;
/* filling lower triangular matrix with
* zeros*/
mat[i][k] = 0;
}
// print(mat); //for matrix state
}
// print(mat); //for matrix state
return -1;
}
// function to calculate the values of the unknowns
static void backSub(double mat[][])
{
double x[]
= new double[N]; // An array to store solution
/* Start calculating from last equation up to the
first */
for (int i = N - 1; i >= 0; i--)
{
/* start with the RHS of the equation */
x[i] = mat[i][N];
/* Initialize j to i+1 since matrix is upper
triangular*/
for (int j = i + 1; j < N; j++)
{
/* subtract all the lhs values
* except the coefficient of the variable
* whose value is being calculated */
x[i] -= mat[i][j] * x[j];
}
/* divide the RHS by the coefficient of the
unknown being calculated */
x[i] = x[i] / mat[i][i];
}
System.out.println();
System.out.println("Solution for the system:");
for (int i = 0; i < N; i++)
{
System.out.format("%.6f", x[i]);
System.out.println();
}
}
// Driver program
public static void main(String[] args)
{
/* input matrix */
double mat[][] = { { 3.0, 2.0, -4.0, 3.0 },
{ 2.0, 3.0, 3.0, 15.0 },
{ 5.0, -3, 1.0, 14.0 } };
gaussianElimination(mat);
}
}
// This code is contributed by Dharanendra L V.PHP
$v_max)
{
$v_max = $mat[$i][$k];
$i_max = $i;
}
/* if a prinicipal diagonal element is zero,
* it denotes that matrix is singular, and
* will lead to a division-by-zero later. */
if (!$mat[$k][$i_max])
return $k; // Matrix is singular
/* Swap the greatest value row with current row */
if ($i_max != $k)
swap_row($mat, $k, $i_max);
for ($i = $k + 1; $i < $N; $i++)
{
/* factor f to set current row kth element to 0,
* and subsequently remaining kth column to 0 */
$f = $mat[$i][$k]/$mat[$k][$k];
/* subtract fth multiple of corresponding kth
row element*/
for ($j = $k + 1; $j <= $N; $j++)
$mat[$i][$j] -= $mat[$k][$j] * $f;
/* filling lower triangular matrix with zeros*/
$mat[$i][$k] = 0;
}
//print(mat); //for matrix state
}
//print(mat); //for matrix state
return -1;
}
// function to calculate the values of the unknowns
function backSub(&$mat)
{
global $N;
$x = array_fill(0, $N, 0); // An array to store solution
/* Start calculating from last equation up to the
first */
for ($i = $N - 1; $i >= 0; $i--)
{
/* start with the RHS of the equation */
$x[$i] = $mat[$i][$N];
/* Initialize j to i+1 since matrix is upper
triangular*/
for ($j = $i + 1; $j < $N; $j++)
{
/* subtract all the lhs values
* except the coefficient of the variable
* whose value is being calculated */
$x[$i] -= $mat[$i][$j] * $x[$j];
}
/* divide the RHS by the coefficient of the
unknown being calculated */
$x[$i] = $x[$i] / $mat[$i][$i];
}
print("\nSolution for the system:\n");
for ($i = 0; $i < $N; $i++)
print(number_format(strval($x[$i]), 6)."\n");
}
// Driver program
/* input matrix */
$mat = array(array(3.0, 2.0,-4.0, 3.0),
array(2.0, 3.0, 3.0, 15.0),
array(5.0, -3, 1.0, 14.0));
gaussianElimination($mat);
// This code is contributed by mits
?>C#
// C# program to demonstrate working
// of Guassian Elimination method
using System;
class GFG{
// Number of unknowns
public static int N = 3;
// Function to get matrix content
static void gaussianElimination(double [,]mat)
{
/* reduction into r.e.f. */
int singular_flag = forwardElim(mat);
/* if matrix is singular */
if (singular_flag != -1)
{
Console.WriteLine("Singular Matrix.");
/* if the RHS of equation corresponding to
zero row is 0, * system has infinitely
many solutions, else inconsistent*/
if (mat[singular_flag,N] != 0)
Console.Write("Inconsistent System.");
else
Console.Write("May have infinitely " +
"many solutions.");
return;
}
/* get solution to system and print it using
backward substitution */
backSub(mat);
}
// Function for elementary operation of swapping two
// rows
static void swap_row(double [,]mat, int i, int j)
{
// printf("Swapped rows %d and %d\n", i, j);
for(int k = 0; k <= N; k++)
{
double temp = mat[i, k];
mat[i, k] = mat[j, k];
mat[j, k] = temp;
}
}
// Function to print matrix content at any stage
static void print(double [,]mat)
{
for(int i = 0; i < N; i++, Console.WriteLine())
for(int j = 0; j <= N; j++)
Console.Write(mat[i, j]);
Console.WriteLine();
}
// Function to reduce matrix to r.e.f.
static int forwardElim(double [,]mat)
{
for(int k = 0; k < N; k++)
{
// Initialize maximum value and index for pivot
int i_max = k;
int v_max = (int)mat[i_max, k];
/* find greater amplitude for pivot if any */
for(int i = k + 1; i < N; i++)
{
if (Math.Abs(mat[i, k]) > v_max)
{
v_max = (int)mat[i, k];
i_max = i;
}
/* If a prinicipal diagonal element is zero,
* it denotes that matrix is singular, and
* will lead to a division-by-zero later. */
if (mat[k, i_max] == 0)
return k; // Matrix is singular
/* Swap the greatest value row with
current row
*/
if (i_max != k)
swap_row(mat, k, i_max);
for(int i = k + 1; i < N; i++)
{
/* factor f to set current row kth element
* to 0, and subsequently remaining kth
* column to 0 */
double f = mat[i, k] / mat[k, k];
/* subtract fth multiple of corresponding
kth row element*/
for(int j = k + 1; j <= N; j++)
mat[i, j] -= mat[k, j] * f;
/* filling lower triangular matrix with
* zeros*/
mat[i, k] = 0;
}
}
// print(mat); //for matrix state
}
// print(mat); //for matrix state
return -1;
}
// Function to calculate the values of the unknowns
static void backSub(double [,]mat)
{
// An array to store solution
double []x = new double[N];
/* Start calculating from last equation up to the
first */
for(int i = N - 1; i >= 0; i--)
{
/* start with the RHS of the equation */
x[i] = mat[i,N];
/* Initialize j to i+1 since matrix is upper
triangular*/
for(int j = i + 1; j < N; j++)
{
/* subtract all the lhs values
* except the coefficient of the variable
* whose value is being calculated */
x[i] -= mat[i,j] * x[j];
}
/* divide the RHS by the coefficient of the
unknown being calculated */
x[i] = x[i] / mat[i,i];
}
Console.WriteLine();
Console.WriteLine("Solution for the system:");
for(int i = 0; i < N; i++)
{
Console.Write("{0:F6}", x[i]);
Console.WriteLine();
}
}
// Driver code
public static void Main(String[] args)
{
/* input matrix */
double [,]mat = { { 3.0, 2.0, -4.0, 3.0 },
{ 2.0, 3.0, 3.0, 15.0 },
{ 5.0, -3, 1.0, 14.0 } };
gaussianElimination(mat);
}
}
// This code is contributed by shikhasingrajput输出:
Solution for the system:
3.000000
1.000000
2.000000插图:
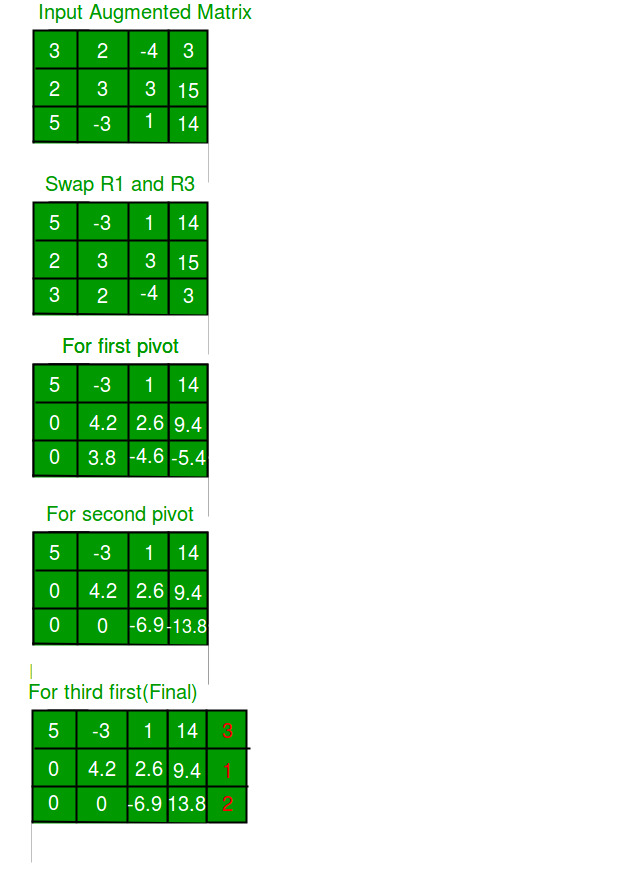
时间复杂度:由于对于每个枢轴,我们遍历该零件在其下一行的右侧,因此O(n)*(O(n)* O(n))= O(n 3 )。
我们还可以应用高斯消去法来计算:
- 矩阵的等级
- 矩阵的行列式
- 可逆方阵的逆