MANET 路由协议
在移动自组织网络(MANET)中,节点不知道其网络的拓扑结构,而是必须自己发现它,因为自组织网络中的拓扑结构是动态拓扑结构。基本规则是,新节点无论何时进入自组织网络,都必须宣布其到达和存在,并且还应收听其他移动节点发出的类似公告广播。
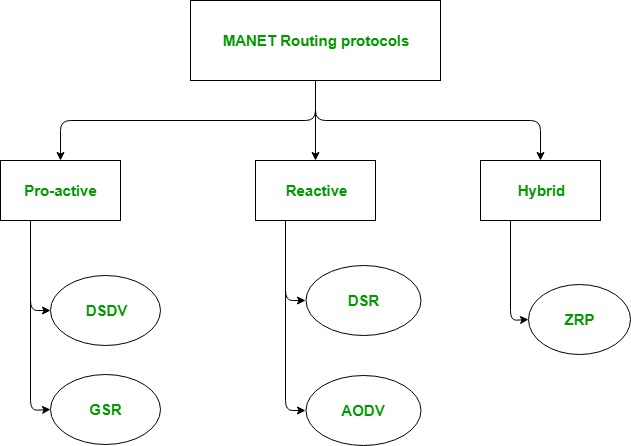
1. 主动路由协议:
这些也称为表驱动路由协议。每个移动节点维护一个单独的路由表,其中包含到所有可能的目标移动节点的路由信息。
由于移动自组织网络中的拓扑是动态的,因此这些路由表会随着网络拓扑的变化而定期更新。它有一个限制,即不适用于大型网络,因为路由表中的条目变得太大,因为它们需要维护到所有可能节点的路由信息。
- 目的地序列距离矢量路由协议 (DSDV):
它是一种主动/表驱动的路由协议。顾名思义,它实际上扩展了有线网络的距离矢量路由协议。它基于 Bellman-ford 路由算法。由于计数到无穷大的问题,距离矢量路由协议不适合移动自组织网络。因此,作为一种解决方案,目的地序列距离矢量路由协议 (DSDV) 应运而生。目标序列号与每个节点维护的路由表中的每个路由条目一起添加。仅当条目包含到具有更高序列号的目的地的新更新路由时,节点才会在表中包含新更新。
- 全球状态路由 (GSR):
它是一种主动/表驱动的路由协议。它实际上扩展了有线网络的链路状态路由。它基于 Dijkstra 的路由算法。链路状态路由协议不适用于移动自组织网络,因为在该协议中,每个节点都将链路状态路由信息直接洪泛到整个网络,即全局洪泛,这可能导致网络中控制数据包的拥塞。因此,作为解决方案,全球状态路由路由协议 (GSR) 应运而生。全局状态路由不会将链路状态路由数据包全局泛洪到网络中。在GSR中,每个移动节点维护一个列表和三个表,即邻接表、拓扑表、下一跳表和距离表。
2. 反应式路由协议:
这些也称为按需路由协议。在这种类型的路由中,仅在需要/需要时才发现路由。路由发现过程是通过在整个移动网络中泛洪路由请求数据包来实现的。它包括两个主要阶段,即路由发现和路由维护。
- 动态源路由协议 (DSR):
它是一种反应式/按需路由协议。在这种类型的路由中,仅在需要/需要时才发现路由。路由发现过程是通过在整个移动网络中泛洪路由请求数据包来实现的。
它由两个阶段组成:- 路线发现:
该阶段确定源和目标移动节点之间数据包传输的最佳路径。 - 路线维护:
此阶段执行路由的维护工作,因为移动自组织网络中的拓扑本质上是动态的,因此存在许多链路中断导致移动节点之间的网络故障的情况。
- 路线发现:
- Ad-Hoc 按需矢量路由协议 (AODV):
它是一种反应式/按需路由协议。它是动态源路由协议(DSR)的扩展,有助于消除动态源路由协议的缺点。在 DSR 中,在路由发现之后,当源移动节点向目的移动节点发送数据包时,它的包头中也包含了完整的路径。因此,随着网络规模的增加,完整路径的长度也会增加,数据包的头部也会增加,从而导致整个网络变慢。因此,Ad-Hoc On Demand Vector Routing 协议成为了它的解决方案。主要区别在于存储路径的方式,AODV 将路径存储在路由表中,而 DSR 将路径存储在数据包的标头中。它也以类似的方式分两个阶段运行:路由发现和路由维护。
3.混合路由协议:
它基本上结合了反应式和主动式路由协议的优点。这些协议本质上是自适应的,并根据源和目标移动节点的区域和位置进行自适应。最流行的混合路由协议之一是区域路由协议 (ZRP) 。
将整个网络划分为不同的区域,然后观察源和目标移动节点的位置。如果源移动节点和目标移动节点位于同一区域,则使用主动路由在它们之间传输数据包。如果源移动节点和目标移动节点位于不同的区域,则使用反应式路由在它们之间传输数据包。