在代数和矩阵的研究中,线性方程组通常以矩阵形式表示。例如,
a 1 x + b 1 y + c 1 = 0
a 2 x + b 2 x + c 2 = 0
这样的系统也可以表示为

现在,该方程组是否具有唯一解,由数字a 1 b 2 – a 2 b 1决定。确定解决方案唯一性的数量称为行列式。它广泛用于计算机科学和电气工程领域。行列式还使我们对空间的面积或体积有所了解。为了解决行列式,我们需要首先理解一些术语,例如未成年人和辅因子。让我们了解它们。
未成年人
要求未成年人找到矩阵的单个元素(每个元素)的行列式。它们是通过消除该元素的行和列而获得的每个元素的决定因素。如果给定的矩阵为:

12的未成年人将是决定因素:

问题:在行列式中找到较小的5 
回答:
The minor of 5 will be the determinant of 
Calculating the determinant, the minor is obtained as:
(2 × 1) – (2 × 2) = -2
辅助因子
辅因子通过一个小公式与次要元素相关,对于元素a ij ,该元素的辅因子为C ij ,而次要元素为M ij,则辅因子可以写为:
Cij = (-1)i+jMij
问题:找到行列式第一行和第二列中元素的辅因子:

回答:
In order to find out the cofactor of the first row and second column element i.e the cofactor for 1. First find out the minor for 1, which will be:

M12 = 4
Now, applying the formula for cofactor:
C12 = (-1)1 + 2M12
⇒ C12 = (-1)3 × 4
⇒ C12 = -4
伴随的
阶数为n的矩阵的伴随可以定义为其辅因子的转置。对于矩阵A:
Adj. A = [Cij]n×nT
矩阵转置
矩阵A的转置表示为A T或A’。显然,矩阵的垂直面称为列,水平面称为行。转置矩阵意味着将行替换为列,反之亦然,因为行和列都在变化,所以顺序矩阵也会改变。
If a Matrix is given as A= [aij]m×n, then its Transpose will become AT or A’ = [aji]n×m
问题:矩阵的转置将是什么:

回答:
Interchanging Rows and Columns, AT = 
行列式
行列式是与每个n阶方阵A = [a ij ]相关的数。矩阵A的行列式由| A |表示或det(A)。
如果A =  ,它的行列式表示为
,它的行列式表示为
行列式的物理意义
考虑一个2D矩阵,该矩阵的每一列都可以视为xy平面上的向量。因此,二维平面上两个向量之间的行列式给出了包围在它们之间的面积。如果我们扩展此概念,则在3D中行列式将为我们提供两个矢量之间的体积。
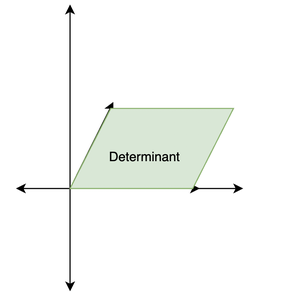
二维中两个向量之间的区域
一阶矩阵的行列式
令X = [a]为一阶矩阵,则其行列式由det(X)= a给出。
二阶矩阵的行列式
令X =  ,它的行列式由元素的交叉乘法给出。
,它的行列式由元素的交叉乘法给出。
det(X)= 
问题:评估A = 
回答:
A = 
行列式3×3的行列式
可以通过用二阶行列式表示来确定它。它可以沿行(R1,R2或R3)或列(C1,C2或C3)扩展。考虑3阶矩阵A。
A = 
步骤1:将R1的第一个元素a11乘以(-1)(1 +1)[(a11中的后缀的(-1)和),并乘以通过删除A的R1和C1行的元素而获得的二阶行列式因为a11位于R1和C1中。 
步骤2:类似地,将第一行R1的第二个元素与删除第一行和第二列之后获得的行列式相乘。 
步骤3:将行R1的第三元素与删除第一行和第三列后获得的行列式相乘。 
步骤4:现在,行列式A的展开,即| A |。可以写成| A | = 
同样,通过这种方式,我们可以沿任何行和任何列扩展它。
问题:评估行列式det(A)= 
回答:
We see that the third column has most number of zeros, so it will be easier to expand along that column.
det(A) = 
行列式的性质
- 反射属性:行列交换后,行列式的值保持不变。矩阵的行列式及其转置保持不变。
- 切换属性:如果行列式的任何两行或列互换,则行列式的符号会更改。
For Example: 
det. A = [3×{(1×1)-(0×1)}]-[3×{(2×1)-(5×1)}]+[0×{(2×0)-(5×1)}]
= {3×(1-0)}-{3×(2-5)+0
= [3-{3(-3)}+0]
= (3+9)
=12
Now, Interchanging Row 1 with Row 2, determinant will be:

det. A = [2×{(3×1)-(0×0)}]-[1×{(3×1)-(5×0)}]+[1×{(3×0)-(5×3)}]
= (6-3-15)
= -12
- 重复属性/比例属性:如果行列式的任何两行或任意两列相同,则行列式的值将变为零。
- 标量多重属性:如果行列式的行(或列)的每个元素乘以常数k,则其值乘以k

- Sum属性:如果行或列的某些或全部元素可以表示为两个或多个项的和,则行列式也可以表示为两个或多个行列式的和。

属性示例
问题1:如果x,y,z不同。和A =  ,则表明1 + xyz = 0。
,则表明1 + xyz = 0。
回答:
Using Sum Property:

On solving this determinant and expanding it,
A = (1 + xyz)(y- x)(z-y)(z-x)
Since it’s given in the question, that all x, y and z have different values and A =0. So the only term that can be zero is 1 + xyz.
Hence, 1 + xyz = 0
问题2:评估 。
。
回答:
Using Scalar Multiple Property and Repetition Property:

问题3:评估行列式A。 
回答:
Using Proportionality Property:
Two of the rows of the matrix are identical.
So, 