- DAA-爬山算法(1)
- DAA-爬山算法
- 爬山算法何时终止? (1)
- 爬山算法何时终止? - 无论代码示例
- 爬山简介 |人工智能
- 爬山简介 |人工智能(1)
- 就地算法(1)
- 就地算法
- 图算法
- 就地算法
- 图算法(1)
- 就地算法(1)
- 肌肉 de hill 外骨骼上肢 (1)
- 算法|位算法|问题1(1)
- 算法|位算法|问题2(1)
- 算法|位算法|问题3(1)
- 算法|位算法|问题1
- 算法|位算法|问题3
- 算法|位算法|问题2
- 肌肉 de hill 外骨骼上肢 - 任何代码示例
- N-皇后问题 |使用随机邻居爬山的本地搜索(1)
- N-皇后问题 |使用随机邻居爬山的本地搜索
- Python算法类
- Python图算法
- Python图算法(1)
- Python算法类(1)
- N皇后问题使用带有随机邻居的爬山进行本地搜索
- N皇后问题使用带有随机邻居的爬山进行本地搜索
- N皇后问题使用带有随机邻居的爬山进行本地搜索
📅 最后修改于: 2020-09-23 09:39:12 🧑 作者: Mango
人工智能中的爬山算法
- 爬山算法是一种局部搜索算法,它会不断地沿海拔/值增加的方向移动,以找到山峰或对该问题的最佳解决方案。当它达到一个峰值,没有邻居有更高的值时,它将终止。
- 爬山算法是一种用于优化数学问题的技术。爬山算法的一个被广泛讨论的例子是旅行推销员问题,其中我们需要最小化推销员的行进距离。
- 它也被称为贪婪本地搜索,因为它只查找其良好的直接邻居状态,而没有超出此范围。
- 爬山算法的节点具有状态和值两个部分。
- 当有良好的启发式功能时,通常会使用“爬山”。
- 在此算法中,我们不需要维护和处理搜索树或图形,因为它仅保留一个当前状态。
爬山的特点:
以下是爬坡算法的一些主要功能:
- 生成和测试变量:爬山是“生成和测试”方法的变量。生成和测试方法会产生反馈,有助于确定在搜索空间中向哪个方向移动。
- 贪婪方法:爬山算法搜索朝着优化成本的方向发展。
- 不回溯:不回溯搜索空间,因为它不记得以前的状态。
爬坡的状态空间图:
状态空间景观是爬山算法的图形表示,它显示了算法的各种状态与目标函数/成本之间的关系图。
在Y轴上,我们采用的函数可以是目标函数或成本函数,而在x轴上则是状态空间。如果Y轴上的函数是成本,则搜索的目标是找到全局最小值和局部最小值。如果Y轴的函数是Objective函数,那么搜索的目标是找到全局最大值和局部最大值。
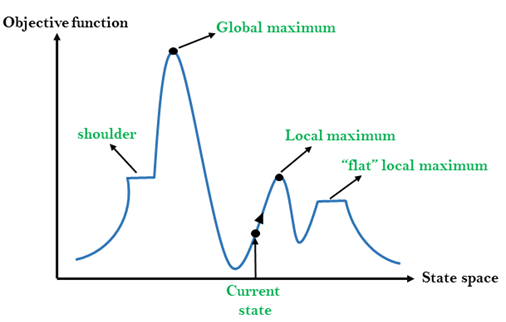
状态空间景观中的不同区域:
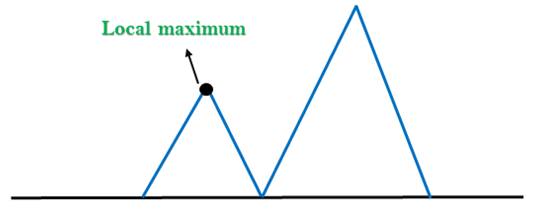
局部最大值:局部最大值是一个比其邻居状态更好的状态,但是还有另一个状态高于其邻居状态。
全局最大值:全局最大值是状态空间景观的最佳可能状态。它具有最高的目标函数值。
当前状态:这是景观图中当前存在代理的状态。
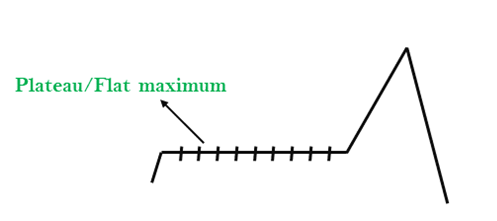
平坦的局部最大值:这是景观中的平坦空间,当前状态的所有相邻状态都具有相同的值。
肩膀:这是一个高原地区,有上坡的边缘。
爬山算法的类型:
- 简单的爬坡:
- 最陡的爬坡:
- 随机爬山:
1.简单的爬坡:
简单的爬山是实现爬山算法的最简单方法。它一次仅评估邻居节点状态,然后选择第一个优化当前成本的状态并将其设置为当前状态。它仅检查它的一个后继状态,如果发现比当前状态更好,则将其他状态转移到相同状态。该算法具有以下特点:
- 耗时少
- 最佳解决方案较少,无法保证解决方案
简单爬坡算法:
- 步骤1:评估初始状态,如果是目标状态,则返回成功并停止。
- 步骤2:循环直到找到解决方案或没有新的运算符可应用。
- 步骤3:选择一个运算符并将其应用于当前状态。
- 步骤4:检查新状态:
- 如果是目标状态,则返回成功并退出。
- 否则,如果它比当前状态更好,则将新状态分配为当前状态。
- 如果不是比当前状态更好,则返回到步骤2。
- 步骤5:退出。
2.最陡峭的登山:
最陡峭上升算法是简单爬山算法的一种变体。该算法检查当前状态的所有相邻节点,并选择一个最接近目标状态的邻居节点。该算法在搜索多个邻居时会消耗更多时间
最陡峭爬坡算法:
- 步骤1:评估初始状态,如果是目标状态,则返回成功并停止,否则将当前状态设为初始状态。
- 步骤2:循环直到找到解决方案或当前状态不变。
- 假设SUCC为一个状态,以使当前状态的任何后继者都比它更好。
- 对于适用于当前状态的每个运算符 :
- 应用新运算符并生成新状态。
- 评估新状态。
- 如果是目标状态,则将其返回并退出,否则将其与SUCC进行比较。
- 如果它优于SUCC,则将新状态设置为SUCC。
- 如果SUCC优于当前状态,则将当前状态设置为SUCC。
- 步骤5:退出。
3.随机爬山:
随机爬山不会在移动之前检查所有邻居。而是,该搜索算法随机选择一个邻居节点,并决定是将其选择为当前状态还是检查另一状态。
爬山算法中的问题:
1.局部最大值:局部最大值是景观中的一个峰值状态,它比其相邻状态中的每个状态都好,但是也存在另一个状态,该状态高于局部最大值。
解决方案:回溯技术可以作为状态空间景观中局部最大值的解决方案。创建有希望的路径的列表,以便算法可以回溯搜索空间并探索其他路径。
2.高原:高原是搜索空间的平坦区域,当前状态的所有相邻状态都包含相同的值,因为该算法无法找到任何最佳移动方向。在高原地区爬坡搜索可能会丢失。
解决方案:高原的解决方案是在搜索时采取大步或很少步来解决问题。随机选择一个远离当前状态的状态,因此该算法有可能找到非平稳区域。
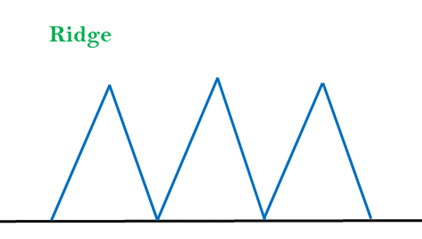
3.脊:脊是局部最大值的一种特殊形式。它的面积比周围的区域高,但它本身具有坡度,无法一口气到达。
解决方案:通过使用双向搜索或沿不同方向移动,我们可以改善此问题。
模拟退火:
爬山算法永远不会朝着较低的值移动,因为它可能会卡在局部最大值上,因此它保证是不完整的。如果算法通过移动后继者来应用随机游走,则它可能会完成但效率不高。模拟退火是产生效率和完整性的算法。
在机械术语中,退火是将金属或玻璃硬化至高温然后逐渐冷却的过程,因此这使金属达到低能晶体状态。在模拟退火中使用相同的过程,在该过程中,算法选择随机移动,而不是选择最佳移动。如果随机移动改善了状态,则它遵循相同的路径。否则,该算法将遵循概率小于1的路径,或者它会下坡并选择另一条路径。