边缘是数字图像中强度的重要局部变化。边缘可以定义为在两个不相交区域之间形成边界的一组连接像素。边缘有三种类型:
- 水平边缘
- 垂直边缘
- 对角线边缘
边缘检测是一种将图像分割为不连续区域的方法。它是数字图像处理中广泛使用的技术,例如
- 模式识别
- 图像形态
- 特征提取
边缘检测使用户可以观察图像的特征,以发现灰度级的显着变化。此纹理指示图像中一个区域的结束和另一个区域的开始。它减少了图像中的数据量,并保留了图像的结构特性。
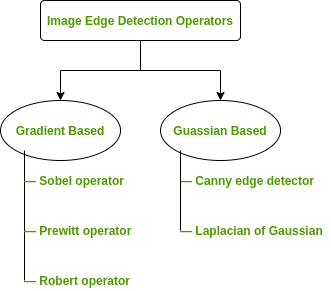
边缘检测运算符有两种:
- 基于梯度的运算符,可计算数字图像中的一阶导数,例如Sobel算运算符,Prewitt运算符,Robert运算符
- 基于高斯运算符,可计算数字图像中的二阶导数,例如Canny边缘检测器,高斯的拉普拉斯算子
Sobel算子:这是一个离散微分运算符。它计算图像强度函数的梯度近似值以进行图像边缘检测。在图像的像素处,Sobel运算符生成矢量的法线或相应的梯度矢量。它使用与输入图像卷积的两个3 x 3内核或蒙版分别计算垂直和水平导数近似值–
![\[M_{x}=\left[\begin{array}{ccc}-1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}-1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1\end{array}\right]\]](https://mangdo-1254073825.cos.ap-chengdu.myqcloud.com//front_eng_imgs/geeksforgeeks2021/Image%20Edge%20Detection%20Operators%20in%20Digital%20Image%20Processing_1.jpg "由QuickLaTeX.com渲染")
好处:
- 简单且省时的计算
- 很容易寻找光滑的边缘
局限性:
- 对角方向点不会始终保留
- 对噪音高度敏感
- 边缘检测不是很准确
- 检测到粗大和粗糙的边缘不会给出适当的结果
Prewitt运算符:此运算符几乎与sobel运算符相似。它还可以检测图像的垂直和水平边缘。这是检测图像方向和大小的最佳方法之一。它使用内核或掩码–
![\[M_{x}=\left[\begin{array}{ccc}-1 & 0 & 1 \\ -1 & 0 & 1 \\ -1 & 0 & 1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}-1 & -1 & -1 \\ 0 & 0 & 0 \\ 1 & 1 & 1\end{array}\right]\]](https://mangdo-1254073825.cos.ap-chengdu.myqcloud.com//front_eng_imgs/geeksforgeeks2021/Image%20Edge%20Detection%20Operators%20in%20Digital%20Image%20Processing_2.jpg "由QuickLaTeX.com渲染")
好处:
- 在检测垂直和水平边缘方面表现出色
- 检测图像方向的最佳运算符
局限性:
- 系数的大小是固定的,无法更改
- 对角方向点不会始终保留
Robert运算符:此基于梯度的运算符通过离散微分计算图像中对角线相邻像素之间差异的平方和。然后进行梯度近似。它使用以下2 x 2内核或掩码–
![\[M_{x}=\left[\begin{array}{ccc}1 & 0 \\ 0 & -1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}0 & 1 \\ -1 & 0\end{array}\right]\]](https://mangdo-1254073825.cos.ap-chengdu.myqcloud.com//front_eng_imgs/geeksforgeeks2021/Image%20Edge%20Detection%20Operators%20in%20Digital%20Image%20Processing_3.jpg "由QuickLaTeX.com渲染")
好处:
- 边缘和方向的检测非常容易
- 保留对角方向点
局限性:
- 对噪音非常敏感
- 边缘检测不是很准确
Marr-Hildreth算子或高斯的拉普拉斯算子(LoG):这是基于高斯的运算符,它使用拉普拉斯算子来获取图像的二阶导数。当灰度过渡似乎突然时,这确实很好用。它适用于过零方法,即当二阶导数过零时,则该特定位置对应于最大级别。这称为边缘位置。在此,高斯运算符降低了噪声,而拉普拉斯算运算符检测到了尖锐的边缘。
高斯函数由以下公式定义:
![\[G(x, y)=\frac{1}{\sqrt{2 \pi \sigma^{2}}} \exp -\left(\frac{x^{2}+y^{2}}{2 \sigma^{2}}\right)\]](https://mangdo-1254073825.cos.ap-chengdu.myqcloud.com//front_eng_imgs/geeksforgeeks2021/Image%20Edge%20Detection%20Operators%20in%20Digital%20Image%20Processing_4.jpg "由QuickLaTeX.com渲染")
在哪里
![]()
是标准偏差。
并且LoG运算符是根据
![\[\mathrm{LoG}=\frac{\partial^{2}}{\partial x^{2}} G(x, y)+\frac{\partial^{2}}{\partial y^{2}} G(x, y)=\frac{x^{2}+y^{2}-2 \sigma^{2}}{\sigma^{4}} \exp \left(-\frac{x^{2}+y^{2}}{2 \sigma^{2}}\right)\]](https://mangdo-1254073825.cos.ap-chengdu.myqcloud.com//front_eng_imgs/geeksforgeeks2021/Image%20Edge%20Detection%20Operators%20in%20Digital%20Image%20Processing_6.jpg "由QuickLaTeX.com渲染")
好处:
- 易于检测边缘及其各种方向
- 各个方向都有固定的特征
局限性:
- 对噪音非常敏感
- 弯曲边缘的定位误差可能很严重
- 它会产生与边缘不对应的嘈杂响应,即所谓的“假边缘”
Canny运算符:这是基于高斯的运算符,用于检测边缘。该运算符不易受噪音干扰。它提取图像特征而不影响或更改特征。 Canny边缘检测器具有源自高斯运算符子Laplacian先前工作的先进算法。它被广泛用于最佳边缘检测技术。它基于三个条件检测边缘:
- 错误率低
- 边缘点必须准确定位
- 应该只有一个边缘响应
好处:
- 它具有良好的本地化
- 它提取图像特征而不改变特征
- 对噪音较不敏感
局限性:
- 有错误的过零
- 复杂的计算和耗时的
图像边缘检测的一些实际应用:
- 医学成像,解剖结构研究
- 在卫星图像中定位对象
- 自动交通控制系统
- 人脸识别和指纹识别