凸多边形的三角剖分是通过在不相邻的顶点(角)之间绘制对角线来形成的,这样对角线就不会相交。问题是找到成本最低的三角剖分成本。三角剖分的成本是其组成三角形的权重之和。每个三角形的重量是它的周长(所有边长之和)
请参阅取自此来源的以下示例。
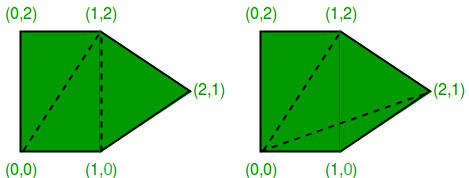
同一个凸五边形的两个三角剖分。左侧三角剖分的成本为 8 + 2√2 + 2√5(约 15.30),右侧三角剖分的成本为 4 + 2√2 + 4√5(约 15.77)。
这个问题具有递归子结构。这个想法是将多边形分成三部分:单个三角形,左侧的子多边形和右侧的子多边形。我们像这样尝试所有可能的划分,并找到最小化三角形成本加上两个子多边形三角剖分成本的划分。
Let Minimum Cost of triangulation of vertices from i to j be minCost(i, j)
If j < i + 2 Then
minCost(i, j) = 0
Else
minCost(i, j) = Min { minCost(i, k) + minCost(k, j) + cost(i, k, j) }
Here k varies from 'i+1' to 'j-1'
Cost of a triangle formed by edges (i, j), (j, k) and (k, i) is
cost(i, j, k) = dist(i, j) + dist(j, k) + dist(k, i)以下是上述朴素递归公式的实现。
C++
// Recursive implementation for minimum cost convex polygon triangulation
#include
#include
#define MAX 1000000.0
using namespace std;
// Structure of a point in 2D plane
struct Point
{
int x, y;
};
// Utility function to find minimum of two double values
double min(double x, double y)
{
return (x <= y)? x : y;
}
// A utility function to find distance between two points in a plane
double dist(Point p1, Point p2)
{
return sqrt((p1.x - p2.x)*(p1.x - p2.x) +
(p1.y - p2.y)*(p1.y - p2.y));
}
// A utility function to find cost of a triangle. The cost is considered
// as perimeter (sum of lengths of all edges) of the triangle
double cost(Point points[], int i, int j, int k)
{
Point p1 = points[i], p2 = points[j], p3 = points[k];
return dist(p1, p2) + dist(p2, p3) + dist(p3, p1);
}
// A recursive function to find minimum cost of polygon triangulation
// The polygon is represented by points[i..j].
double mTC(Point points[], int i, int j)
{
// There must be at least three points between i and j
// (including i and j)
if (j < i+2)
return 0;
// Initialize result as infinite
double res = MAX;
// Find minimum triangulation by considering all
for (int k=i+1; k Java
// Class to store a point in the Euclidean plane
class Point
{
int x, y;
public Point(int x, int y)
{
this.x = x;
this.y = y;
}
// Utility function to return the distance between two
// vertices in a 2-dimensional plane
public double dist(Point p)
{
// The distance between vertices `(x1, y1)` & `(x2,
// y2)` is `√((x2 − x1) ^ 2 + (y2 − y1) ^ 2)`
return Math.sqrt((this.x - p.x) * (this.x - p.x)
+ (this.y - p.y) * (this.y - p.y));
}
}
class GFG
{
// Function to calculate the weight of optimal
// triangulation of a convex polygon represented by a
// given set of vertices `vertices[i..j]`
public static double MWT(Point[] vertices, int i, int j)
{
// If the polygon has less than 3 vertices,
// triangulation is not possible
if (j < i + 2)
{
return 0;
}
// keep track of the total weight of the minimum
// weight triangulation of `MWT(i,j)`
double cost = Double.MAX_VALUE;
// consider all possible triangles `ikj` within the
// polygon
for (int k = i + 1; k <= j - 1; k++)
{
// The weight of a triangulation is the length
// of perimeter of the triangle
double weight = vertices[i].dist(vertices[j])
+ vertices[j].dist(vertices[k])
+ vertices[k].dist(vertices[i]);
// choose the vertex `k` that leads to the
// minimum total weight
cost = Double.min(cost,
weight + MWT(vertices, i, k)
+ MWT(vertices, k, j));
}
return cost;
}
// Driver code
public static void main(String[] args)
{
// vertices are given in clockwise order
Point[] vertices
= { new Point(0, 0), new Point(2, 0),
new Point(2, 1), new Point(1, 2),
new Point(0, 1) };
System.out.println(MWT(vertices,
0, vertices.length - 1));
}
}
// This code is contributed by Priiyadarshini KumariPython3
# Recursive implementation for minimum
# cost convex polygon triangulation
from math import sqrt
MAX = 1000000.0
# A utility function to find distance
# between two points in a plane
def dist(p1, p2):
return sqrt((p1[0] - p2[0])*(p1[0] - p2[0]) + \
(p1[1] - p2[1])*(p1[1] - p2[1]))
# A utility function to find cost of
# a triangle. The cost is considered
# as perimeter (sum of lengths of all edges)
# of the triangle
def cost(points, i, j, k):
p1 = points[i]
p2 = points[j]
p3 = points[k]
return dist(p1, p2) + dist(p2, p3) + dist(p3, p1)
# A recursive function to find minimum
# cost of polygon triangulation
# The polygon is represented by points[i..j].
def mTC(points, i, j):
# There must be at least three points between i and j
# (including i and j)
if (j < i + 2):
return 0
# Initialize result as infinite
res = MAX
# Find minimum triangulation by considering all
for k in range(i + 1, j):
res = min(res, (mTC(points, i, k) + \
mTC(points, k, j) + \
cost(points, i, k, j)))
return round(res, 4)
# Driver code
points = [[0, 0], [1, 0], [2, 1], [1, 2], [0, 2]]
n = len(points)
print(mTC(points, 0, n-1))
# This code is contributed by SHUBHAMSINGH10C
// A Dynamic Programming based program to find minimum cost of convex
// polygon triangulation
#include
#include
#define MAX 1000000.0
using namespace std;
// Structure of a point in 2D plane
struct Point
{
int x, y;
};
// Utility function to find minimum of two double values
double min(double x, double y)
{
return (x <= y)? x : y;
}
// A utility function to find distance between two points in a plane
double dist(Point p1, Point p2)
{
return sqrt((p1.x - p2.x)*(p1.x - p2.x) +
(p1.y - p2.y)*(p1.y - p2.y));
}
// A utility function to find cost of a triangle. The cost is considered
// as perimeter (sum of lengths of all edges) of the triangle
double cost(Point points[], int i, int j, int k)
{
Point p1 = points[i], p2 = points[j], p3 = points[k];
return dist(p1, p2) + dist(p2, p3) + dist(p3, p1);
}
// A Dynamic programming based function to find minimum cost for convex
// polygon triangulation.
double mTCDP(Point points[], int n)
{
// There must be at least 3 points to form a triangle
if (n < 3)
return 0;
// table to store results of subproblems. table[i][j] stores cost of
// triangulation of points from i to j. The entry table[0][n-1] stores
// the final result.
double table[n][n];
// Fill table using above recursive formula. Note that the table
// is filled in diagonal fashion i.e., from diagonal elements to
// table[0][n-1] which is the result.
for (int gap = 0; gap < n; gap++)
{
for (int i = 0, j = gap; j < n; i++, j++)
{
if (j < i+2)
table[i][j] = 0.0;
else
{
table[i][j] = MAX;
for (int k = i+1; k < j; k++)
{
double val = table[i][k] + table[k][j] + cost(points,i,j,k);
if (table[i][j] > val)
table[i][j] = val;
}
}
}
}
return table[0][n-1];
}
// Driver program to test above functions
int main()
{
Point points[] = {{0, 0}, {1, 0}, {2, 1}, {1, 2}, {0, 2}};
int n = sizeof(points)/sizeof(points[0]);
cout << mTCDP(points, n);
return 0;
} 输出:
15.3006上述问题类似于矩阵链乘法。下面是 mTC(points[], 0, 4) 的递归树。
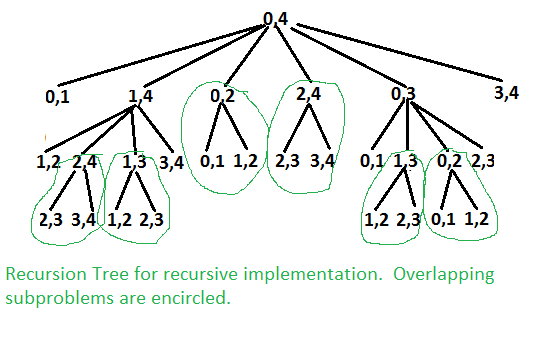
从上面的递归树中可以很容易看出,这个问题有很多重叠的子问题。由于该问题具有两个性质:最优子结构和重叠子问题,因此可以使用动态规划有效地解决。
以下是动态编程解决方案的 C++ 实现。
C
// A Dynamic Programming based program to find minimum cost of convex
// polygon triangulation
#include
#include
#define MAX 1000000.0
using namespace std;
// Structure of a point in 2D plane
struct Point
{
int x, y;
};
// Utility function to find minimum of two double values
double min(double x, double y)
{
return (x <= y)? x : y;
}
// A utility function to find distance between two points in a plane
double dist(Point p1, Point p2)
{
return sqrt((p1.x - p2.x)*(p1.x - p2.x) +
(p1.y - p2.y)*(p1.y - p2.y));
}
// A utility function to find cost of a triangle. The cost is considered
// as perimeter (sum of lengths of all edges) of the triangle
double cost(Point points[], int i, int j, int k)
{
Point p1 = points[i], p2 = points[j], p3 = points[k];
return dist(p1, p2) + dist(p2, p3) + dist(p3, p1);
}
// A Dynamic programming based function to find minimum cost for convex
// polygon triangulation.
double mTCDP(Point points[], int n)
{
// There must be at least 3 points to form a triangle
if (n < 3)
return 0;
// table to store results of subproblems. table[i][j] stores cost of
// triangulation of points from i to j. The entry table[0][n-1] stores
// the final result.
double table[n][n];
// Fill table using above recursive formula. Note that the table
// is filled in diagonal fashion i.e., from diagonal elements to
// table[0][n-1] which is the result.
for (int gap = 0; gap < n; gap++)
{
for (int i = 0, j = gap; j < n; i++, j++)
{
if (j < i+2)
table[i][j] = 0.0;
else
{
table[i][j] = MAX;
for (int k = i+1; k < j; k++)
{
double val = table[i][k] + table[k][j] + cost(points,i,j,k);
if (table[i][j] > val)
table[i][j] = val;
}
}
}
}
return table[0][n-1];
}
// Driver program to test above functions
int main()
{
Point points[] = {{0, 0}, {1, 0}, {2, 1}, {1, 2}, {0, 2}};
int n = sizeof(points)/sizeof(points[0]);
cout << mTCDP(points, n);
return 0;
}
输出:
15.3006如果您希望与专家一起参加现场课程,请参阅DSA 现场工作专业课程和学生竞争性编程现场课程。