- 规范标签 - Html (1)
- 规范语法 (1)
- 乳胶中的规范宏 (1)
- 规范标签 - Html 代码示例
- 规范标签 - Dart (1)
- 如何在 c + 中对矩阵进行规范 (1)
- 什么是“规范路径”? - Java (1)
- 乳胶中的规范宏 - 任何代码示例
- 规范语法 - 无论代码示例
- 规范标签 - Dart 代码示例
- 什么是“规范路径”? - Java 代码示例
- 创建没有规范的组件 (1)
- oracle 创建包规范 - SQL 代码示例
- Ubuntu 系统规范 - Shell-Bash (1)
- favicon 规范 - Html (1)
- 规范封面
- 规范封面(1)
- 规范形式之间的转换
- 规范形式之间的转换(1)
- 规范符号乳胶 (1)
- 创建没有规范的服务 (1)
- 如何在 c + 中对矩阵进行规范 - 无论代码示例
- 最小到规范形式的转换
- 最小到规范形式的转换
- 最小到规范形式的转换(1)
- 最小到规范形式的转换(1)
- Ubuntu 系统规范 - Shell-Bash 代码示例
- favicon 规范 - Html 代码示例
- 规范和标准形式
📅 最后修改于: 2020-11-25 05:17:02 🧑 作者: Mango
在本章中,让我们讨论二阶系统的时域规范。下图显示了二阶系统对欠阻尼情况的阶跃响应。
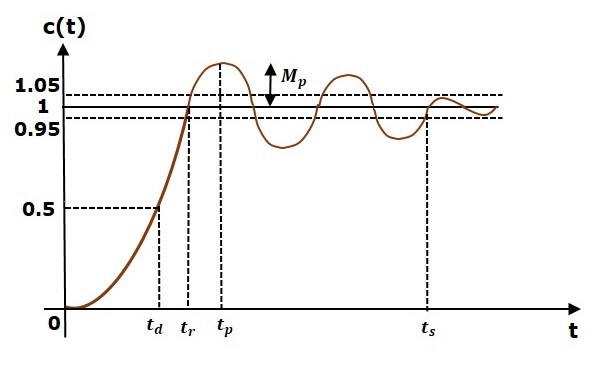
该图中表示了所有时域规范。直至稳定时间的响应称为瞬态响应,稳定时间之后的响应称为稳态响应。
延迟时间
这是响应从零瞬间起达到其最终值的一半所需的时间。用$ t_d $表示。
当“δ”介于零和一之间时,考虑二阶系统对于t≥0的阶跃响应。
$$ c(t)= 1- \ left(\ frac {e ^ {-\ delta \ omega_nt}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt + \ theta)$$
阶跃响应的最终值为1。
因此,在$ t = t_d $处,阶跃响应的值为0.5。将这些值代入上式。
$$ c(t_d)= 0.5 = 1- \ left(\ frac {e ^ {-\ delta \ omega_nt_d}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt_d + \ theta) $$
$$ \ Rightarrow \ left(\ frac {e ^ {-\ delta \ omega_nt_d}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt_d + \ theta)= 0.5 $$
通过使用线性逼近,您将获得延迟时间t d为
$$ t_d = \ frac {1 + 0.7 \ delta} {\ omega_n} $$
上升时间
这是响应从其最终值的0%上升到100%所需的时间。这适用于欠阻尼系统。对于过阻尼的系统,请考虑持续时间为最终值的10%至90%。上升时间用t r表示。
在t = t 1 = 0时,c(t)= 0。
我们知道阶跃响应的最终值为1。
因此,在$ t = t_2 $处,阶跃响应的值为1。将这些值代入以下公式。
$$ c(t)= 1- \ left(\ frac {e ^ {-\ delta \ omega_nt}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt + \ theta)$$
$$ c(t_2)= 1 = 1- \ left(\ frac {e ^ {-\ delta \ omega_nt_2}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt_2 + \ theta) $$
$$ \ Rightarrow \ left(\ frac {e ^ {-\ delta \ omega_nt_2}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt_2 + \ theta)= 0 $$
$$ \ Rightarrow \ sin(\ omega_dt_2 + \ theta)= 0 $$
$$ \ Rightarrow \ omega_dt_2 + \ theta = \ pi $$
$$ \ Rightarrow t_2 = \ frac {\ pi- \ theta} {\ omega_d} $$
用以下上升时间方程式替换t 1和t 2值,
$$ t_r = t_2-t_1 $$
$$ \因此\:t_r = \ frac {\ pi- \ theta} {\ omega_d} $$
从上面的方程式,我们可以得出结论,上升时间$ t_r $和阻尼频率$ \ omega_d $彼此成反比。
高峰时段
这是响应第一次达到峰值所需的时间。用$ t_p $表示。在$ t = t_p $时,响应的一阶导数为零。
我们知道对于欠阻尼情况,二阶系统的阶跃响应为
$$ c(t)= 1- \ left(\ frac {e ^ {-\ delta \ omega_nt}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt + \ theta)$$
将$ c(t)$与’t’相区别。
$$ \ frac {\ text {d} c(t)} {\ text {d} t} =-\ left(\ frac {e ^ {-\ delta \ omega_nt}} {\ sqrt {1- \ delta ^ 2}} \ right} \ omega_d \ cos(\ omega_dt + \ theta)-\ left(\ frac {-\ delta \ omega_ne ^ {-\ delta \ omega_nt}} {\ sqrt {1- \ delta ^ 2}} \ \右)\ sin(\ omega_dt + \ theta)$$
代入$ t = t_p $和$ \ frac {\ text {d} c(t)} {\ text {d} t} = 0 $。
$$ 0 =-\左(\ frac {e ^ {-\ delta \ omega_nt_p}} {\ sqrt {1- \ delta ^ 2}} \ right)\ left [\ omega_d \ cos(\ omega_dt_p + \ theta)-\ delta \ omega_n \ sin(\ omega_dt_p + \ theta)\ right] $$
$$ \ Rightarrow \ omega_n \ sqrt {1- \ delta ^ 2} \ cos(\ omega_dt_p + \ theta)-\ delta \ omega_n \ sin(\ omega_dt_p + \ theta)= 0 $$
$$ \ Rightarrow \ sqrt {1- \ delta ^ 2} \ cos(\ omega_dt_p + \ theta)-\ delta \ sin(\ omega_dt_p + \ theta)= 0 $$
$$ \ Rightarrow \ sin(\ theta)\ cos(\ omega_dt_p + \ theta)-\ cos(\ theta)\ sin(\ omega_dt_p + \ theta)= 0 $$
$$ \ Rightarrow \ sin(\ theta- \ omega_dt_p- \ theta)= 0 $$
$$ \ Rightarrow sin(-\ omega_dt_p)= 0 \ Rightarrow-\ sin(\ omega_dt_p)= 0 \ Rightarrow sin(\ omega_dt_p)= 0 $$
$$ \ Rightarrow \ omega_dt_p = \ pi $$
$$ \ Rightarrow t_p = \ frac {\ pi} {\ omega_d} $$
从上面的方程式,我们可以得出结论,峰值时间$ t_p $和阻尼频率$ \ omega_d $彼此成反比。
峰值超调
峰值超调M p定义为峰值时间响应与最终响应值的偏差。也称为最大超调。
数学上,我们可以写成
$$ M_p = c(t_p)-c(\ infty)$$
哪里,
c(t p )是响应的峰值。
c(∞)是响应的最终(稳态)值。
在$ t = t_p $时,响应c(t)为-
$$ c(t_p)= 1- \ left(\ frac {e ^ {-\ delta \ omega_nt_p}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin(\ omega_dt_p + \ theta)$$
用上述等式右侧的$ t_p = \ frac {\ pi} {\ omega_d} $代替。
$$ c(t_P)= 1- \ left(\ frac {e ^ {-\ delta \ omega_n \ left(\ frac {\ pi} {\ omega_d} \ right)}}} {\ sqrt {1- \ delta ^ 2}} \ right)\ sin \ left(\ omega_d \ left(\ frac {\ pi} {\ omega_d} \ right)+ \ theta \ right)$$
$$ \ Rightarrow c(t_p)= 1- \ left(\ frac {e ^ {-\ left(\ frac {\ delta \ pi} {\ sqrt {1- \ delta ^ 2}} \ right)}} { \ sqrt {1- \ delta ^ 2}} \ right)(-\ sin(\ theta))$$
我们知道
$$ \ sin(\ theta)= \ sqrt {1- \ delta ^ 2} $$
因此,我们将获得$ c(t_p)$作为
$$ c(t_p)= 1 + e ^ {-\ left(\ frac {\ delta \ pi} {\ sqrt {1- \ delta ^ 2}} \ right)} $$
用峰值超调方程替换$ c(t_p)$和$ c(\ infty)$的值。
$$ M_p = 1 + e ^ {-\ left(\ frac {\ delta \ pi} {\ sqrt {1- \ delta ^ 2}} \ right)}-1 $$
$$ \ Rightarrow M_p = e ^ {-\ left(\ frac {\ delta \ pi} {\ sqrt {1- \ delta ^ 2}} \ right)} $$
可以使用此公式计算峰值超调百分比$ M_p $。
$$ \%M_p = \ frac {M_p} {c(\ infty}} \次100 \%$$
通过在上面的公式中替换$ M_p $和$ c(\ infty)$的值,我们将得出峰值超调$ \%M_p $的百分比为
$$ \%M_p = \ left(e ^ {-\ left(\ frac {\ delta \ pi} {\ sqrt {1- \ delta ^ 2}} \ right}} \ right)\ times 100 \%$$
从上面的方程式,我们可以得出结论,如果阻尼比$ \ delta $增加,则峰值超调$ \%M_p $的百分比将减小。
建立时间
这是响应达到稳态并保持在最终值附近的指定公差带内所需的时间。通常,公差带为2%和5%。稳定时间用$ t_s $表示。
5%公差带的建立时间为-
$$ t_s = \ frac {3} {\ delta \ omega_n} = 3 \ tau $$
2%公差带的建立时间为-
$$ t_s = \ frac {4} {\ delta \ omega_n} = 4 \ tau $$
其中,$ \ tau $是时间常数,等于$ \ frac {1} {\ delta \ omega_n} $。
-
稳定时间$ t_s $和时间常数$ \ tau $都与阻尼比$ \ delta $成反比。
-
稳定时间$ t_s $和时间常数$ \ tau $均与系统增益无关。这意味着即使系统增益发生变化,建立时间$ t_s $和时间常数$ \ tau $也将永远不会改变。
例
现在让我们找到将单位阶跃信号用作该控制系统的输入时具有闭环传递函数$ \ frac {4} {s ^ 2 + 2s + 4} $的控制系统的时域规范。
我们知道二阶闭环控制系统传递函数的标准形式为
$$ \ frac {\ omega_n ^ 2} {s ^ 2 + 2 \ delta \ omega_ns + \ omega_n ^ 2} $$
通过将这两个传递函数等价,我们将获得未阻尼的固有频率$ \ omega_n $为2 rad / sec,阻尼比$ \ delta $为0.5。
我们知道阻尼频率$ \ omega_d $的公式为
$$ \ omega_d = \ omega_n \ sqrt {1- \ delta ^ 2} $$
用上述公式中的$ \ omega_n $和$ \ delta $值代替。
$$ \ Rightarrow \ omega_d = 2 \ sqrt {1-(0.5)^ 2} $$
$$ \ Rightarrow \ omega_d = 1.732 \:rad / sec $$
代入以下关系式中的$ \ delta $值:
$$ \ theta = \ cos ^ {-1} \ delta $$
$$ \ Rightarrow \ theta = \ cos ^ {-1}(0.5)= \ frac {\ pi} {3} \:rad $$
将上述必要值代入每个时域规范的公式中,并简化以得到给定传递函数的时域规范值。
下表显示了时域规范,必要值的替换和最终值的公式。
| Time domain specification | Formula | Substitution of values in Formula | Final value |
|---|---|---|---|
|
Delay time |
$t_d=\frac{1+0.7\delta}{\omega_n}$ |
$t_d=\frac{1+0.7(0.5)}{2}$ |
$t_d$=0.675 sec |
|
Rise time |
$t_r=\frac{\pi-\theta}{\omega_d}$ |
$t_r=\frac{\pi-(\frac{\pi}{3})}{1.732}$ |
$t_r$=1.207 sec |
|
Peak time |
$t_p=\frac{\pi}{\omega_d}$ |
$t_p=\frac{\pi}{1.732}$ |
$t_p$=1.813 sec |
|
% Peak overshoot |
$\%M_p=\left( e^{-\left (\frac{\delta\pi}{\sqrt{1-\delta^2}} \right ) }\right )\times 100\%$ |
$\%M_p=\left( e^{-\left (\frac{0.5\pi}{\sqrt{1-(0.5)^2}} \right ) }\right )\times 100\%$ |
$\% \: M_p$=16.32% |
|
Settling time for 2% tolerance band |
$t_s=\frac{4}{\delta\omega_n}$ |
$t_S=\frac{4}{(0.5)(2)}$ |
$t_s$=4 sec |