- CSS |变换属性(1)
- CSS |变换式属性
- CSS |变换属性
- python中的z变换(1)
- SVG 变换属性(1)
- SVG 变换属性
- python代码示例中的z变换
- 变换 - CSS 代码示例
- Matplotlib-变换
- Matplotlib-变换(1)
- 变换元素 - CSS (1)
- DSP-Z变换属性
- DSP-Z变换属性(1)
- CSS |变换原点属性(1)
- CSS |变换原点属性
- 流变换颤动 (1)
- 拉普拉斯变换属性(1)
- 拉普拉斯变换属性
- MATLAB-变换
- MATLAB-变换(1)
- 傅立叶变换属性
- 变换元素 - CSS 代码示例
- 熊猫变换 - Python 代码示例
- 如何使用 CSS 将多个变换属性应用于元素?(1)
- 如何使用 CSS 将多个变换属性应用于元素?
- 流变换颤动 - 任何代码示例
- js 变换旋转 - Javascript (1)
- 点击变换 - CSS (1)
- CSS |二维变换
📅 最后修改于: 2020-11-22 17:33:02 🧑 作者: Mango
Z变换具有以下属性:
线性特性
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
和$ \,y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y(Z)$
然后,线性属性指出
$ a \,x(n)+ b \,y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} a \,X(Z)+ b \,Y(Z)$
时移属性
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
然后,时移属性指出
$ x(nm)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} z ^ {-m} X(Z)$
乘以指数序列属性
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
然后乘以一个指数序列属性表示
$ a ^ n \,。 x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z / a)$
时间反转属性
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
然后,时间反转属性指出
$ x(-n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(1 / Z)$
Z域或n属性相乘的微分
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
然后乘以n或z域属性的微分表示
$ n ^ kx(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} [-1] ^ kz ^ k {d ^ k X(Z)\ over dZ ^ K} $
卷积性质
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
和$ \,y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y(Z)$
然后卷积属性指出
$ x(n)* y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z).Y(Z)$
相关属性
如果$ \,x(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z)$
和$ \,y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y(Z)$
然后相关属性指出
$ x(n)\ otimes y(n)\ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X(Z).Y(Z ^ {-1})$
初始值和最终值定理
为因果信号定义了z变换的初始值和最终值定理。
初值定理
对于因果信号x(n),初始值定理指出:
$ x(0)= \ lim_ {z \ to \ infty}X(z)$
这用于查找信号的初始值而无需进行反z变换
终值定理
对于因果信号x(n),最终值定理指出:
$ x(\ infty)= \ lim_ {z \ to 1} [z-1]X(z)$
这用于查找信号的最终值而无需进行反z变换。
Z变换的收敛区域(ROC)
z变换收敛的z的变化范围称为z变换收敛的区域。
Z变换的ROC属性
-
z转换的ROC用z平面中的圆圈表示。
-
ROC不包含任何极点。
-
如果x(n)是有限持续时间的因果序列或右侧序列,则ROC是整个z平面,除了z = 0时。
-
如果x(n)是有限持续时间的反因果序列或左侧序列,则ROC是整个z平面,除了z =∞时。
-
如果x(n)是无限持续时间的因果序列,则ROC在半径为aie | z |的圆的外部。 >一个
-
如果x(n)是无限持续时间的因果序列,则ROC是半径为aie | z |的圆的内部。
-
如果x(n)是有限持续时间的两侧序列,则ROC是整个z平面,除了z = 0和z =∞时。
ROC的概念可以通过以下示例进行解释:
示例1:找到$ a ^ nu [n] + a ^ {-} nu [-n-1] $的z变换和ROC
$ ZT [a ^ nu [n]] + ZT [a ^ {-n} u [-n-1]] = {Z \ over Za} + {Z \ over Z {-1 \ over a}} $
$$ ROC:| z | \ gt一个\ quad \ quad ROC:| z | \ lt {1 \ over a} $$
ROC的图有两个条件,分别是> 1和<1,因为您不知道a。
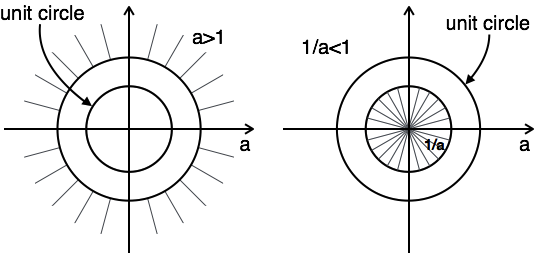
在这种情况下,没有ROC组合。
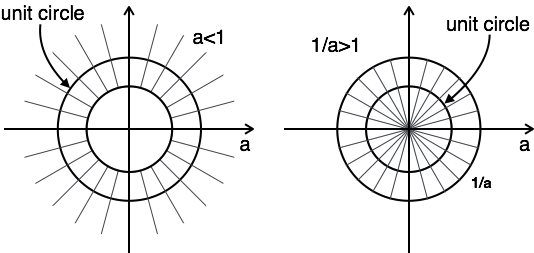
在这里,ROC的组合来自$ a \ lt | z | \ lt {1 \ over a} $
因此,对于此问题,当a <1时,可以进行z变换。
因果关系和稳定性
离散时间LTI系统的因果条件如下:
离散时间LTI系统在
-
ROC在最外面的极点之外。
-
在传递函数H [Z]中,分子的阶次不能比分母的阶次大。
离散时间LTI系统的稳定性条件
离散时间LTI系统在以下情况下是稳定的
-
它的系统函数H [Z]包括单位圆| z | = 1。
-
传递函数的所有极点都位于单位圆| z | = 1内。
基本信号的Z变换
| x(t) | X[Z] |
|---|---|
| $\delta$ | 1 |
| $u(n)$ | ${Z\over Z-1}$ |
| $u(-n-1)$ | $ -{Z\over Z-1}$ |
| $\delta(n-m)$ | $z^{-m}$ |
| $a^n u[n]$ | ${Z \over Z-a}$ |
| $a^n u[-n-1]$ | $- {Z \over Z-a}$ |
| $n\,a^n u[n]$ | ${aZ \over |Z-a|^2}$ |
| $n\,a^n u[-n-1] $ | $- {aZ \over |Z-a|^2}$ |
| $a^n \cos \omega n u[n] $ | ${Z^2-aZ \cos \omega \over Z^2-2aZ \cos \omega +a^2}$ |
| $a^n \sin \omega n u[n] $ | $ {aZ \sin \omega \over Z^2 -2aZ \cos \omega +a^2 } $ |