- 版本控制系统(1)
- 版本控制系统
- 控制系统教程
- 控制系统教程(1)
- 控制系统-简介(1)
- 控制系统-简介
- 讨论控制系统(1)
- 讨论控制系统
- 控制系统-控制器(1)
- 控制系统-控制器
- Git版本控制系统
- Git版本控制系统(1)
- 控制系统-有用的资源
- 控制系统-反馈
- 控制系统-反馈(1)
- 控制系统-极坐标图(1)
- 控制系统-极坐标图
- 控制系统-框图(1)
- 控制系统-框图
- 控制系统-状态空间模型
- 控制系统-状态空间模型(1)
- 模糊逻辑控制系统(1)
- 模糊逻辑-控制系统(1)
- 模糊逻辑控制系统
- 模糊逻辑-控制系统
- 控制系统-稳定性
- 控制系统-状态空间分析
- SaltStack-访问控制系统(1)
- SaltStack-访问控制系统
📅 最后修改于: 2020-11-25 05:11:24 🧑 作者: Mango
控制系统可以用称为数学模型的一组数学方程式表示。这些模型对于控制系统的分析和设计很有用。控制系统的分析意味着当我们知道输入和数学模型时就找到输出。控制系统的设计意味着当我们知道输入和输出时就找到数学模型。
主要使用以下数学模型。
- 微分方程模型
- 传递函数模型
- 状态空间模型
让我们讨论本章中的前两个模型。
微分方程模型
微分方程模型是控制系统的时域数学模型。请按照以下步骤进行微分方程模型。
-
将基本法律应用于给定的控制系统。
-
通过消除中间变量,获得关于输入和输出的微分方程。
例
如图所示,考虑以下电气系统。该电路由电阻器,电感器和电容器组成。所有这些电气元件串联连接。施加到该电路的输入电压为$ v_i $,电容器两端的电压为输出电压$ v_o $。
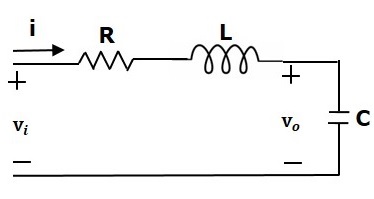
该电路的网格方程为
$$ v_i = Ri + L \ frac {\ text {d} i} {\ text {d} t} + v_o $$
代替上述公式中流过电容器$ i = c \ frac {\ text {d} v_o} {\ text {d} t} $的电流。
$$ \ Rightarrow \:v_i = RC \ frac {\ text {d} v_o} {\ text {d} t} + LC \ frac {\ text {d} ^ 2v_o} {\ text {d} t ^ 2} + v_o $$
$$ \ Rightarrow \ frac {\ text {d} ^ 2v_o} {\ text {d} t ^ 2} + \ left(\ frac {R} {L} \ right)\ frac {\ text {d} v_o} {\ text {d} t} + \ left(\ frac {1} {LC} \ right)v_o = \ left(\ frac {1} {LC} \ right)v_i $$
上式是二阶微分方程。
传递函数模型
传递函数模型是控制系统的s域数学模型。假设所有初始条件均为零,则线性时不变(LTI)系统的传递函数定义为输出的拉普拉斯变换与输入的拉普拉斯变换之比。
如果$ x(t)$和$ y(t)$是LTI系统的输入和输出,则相应的Laplace变换是$ X(s)$和$ Y(s)$。
因此,LTI系统的传递函数等于$ Y(s)$和$ X(s)$之比。
$$ ie,\:Transfer \:Function = \ frac {Y(s)} {X(s)} $$
LTI系统的传递函数模型如下图所示。
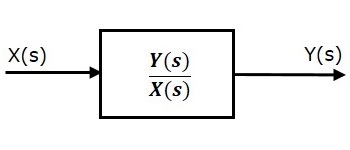
在这里,我们代表了一个LTI系统,其内部具有一个具有传递函数的模块。并且该块具有输入$ X(s)$和输出$ Y(s)$。
例
以前,我们得到一个电气系统的微分方程为
$$ \ frac {\ text {d} ^ 2v_o} {\ text {d} t ^ 2} + \ left(\ frac {R} {L} \ right)\ frac {\ text {d} v_o} {\文字{d} t} + \ left(\ frac {1} {LC} \ right)v_o = \ left(\ frac {1} {LC} \ right)v_i $$
在两侧应用拉普拉斯变换。
$$ s ^ 2V_o + sleft(\ frac {sR} {L} \ right)V_o(s ++ left(\ frac {1} {LC} \ right)V_o(s)= \ left( \ frac {1} {LC} \ right)V_i(s)$$
$$ \ Rightarrow \ left \ {s ^ 2 + \ left(\ frac {R} {L} \ right)s + \ frac {1} {LC} \ right \} V_o(s)= \ left(\ frac { 1} {LC} \ right)V_i(s)$$
$$ \ Rightarrow \ frac {V_o(s)} {V_i(s)} = \ frac {\ frac {1} {LC}} {s ^ 2 + \ left(\ frac {R} {L} \ right) s + \ frac {1} {LC}} $$
哪里,
-
$ v_i(s)$是输入电压$ v_i $的拉普拉斯变换
-
$ v_o(s)$是输出电压$ v_o $的拉普拉斯变换
上式是二阶电气系统的传递函数。该系统的传递函数模型如下所示。
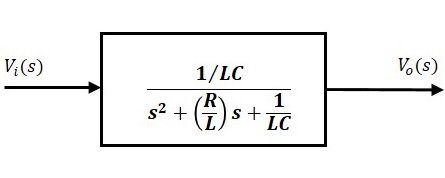
在这里,我们展示了一个带有阶跃函数的二阶电气系统。并且该块具有输入$ V_i(s)$和输出$ V_o(s)$。