- 版本控制系统
- 版本控制系统(1)
- 控制系统教程(1)
- 控制系统教程
- 控制系统-简介(1)
- 控制系统-简介
- 使用极坐标方法定义圆(1)
- 使用极坐标方法定义圆
- 讨论控制系统(1)
- 讨论控制系统
- 如何将 1- i 转换为极坐标形式?
- 控制系统-控制器
- 控制系统-控制器(1)
- 在Python中使用 Plotly 的极坐标图
- 在Python中使用 Plotly 的极坐标图(1)
- Git版本控制系统(1)
- Git版本控制系统
- 极坐标到笛卡尔java(1)
- 复数的极坐标表示(1)
- 复数的极坐标表示
- 极坐标到笛卡尔java代码示例
- Python程序将复数转换为极坐标
- Python程序将复数转换为极坐标(1)
- 控制系统-有用的资源
- 控制系统-反馈(1)
- 控制系统-反馈
- java笛卡尔到极坐标 - Java(1)
- 控制系统-框图(1)
- 控制系统-框图
📅 最后修改于: 2020-11-25 05:21:49 🧑 作者: Mango
在前面的章节中,我们讨论了波特图。在那里,我们有幅值和相位与频率的函数,两个独立的地块。现在让我们讨论极坐标图。极坐标图是可以在幅度和相位之间绘制的图。在此,幅度仅由正常值表示。
$ G(j \ omega)H(j \ omega)$的极形式为
$$ G(j \ omega)H(j \ omega)= | G(j \ omega)H(j \ omega)| \ angle G(j \ omega)H(j \ omega)$$
极坐标图是一个图,可以通过从零到∞改变$ \ omega $来绘制$ G(j \ω)H(j \ omega)$的大小和相位角。极坐标图如下图所示。
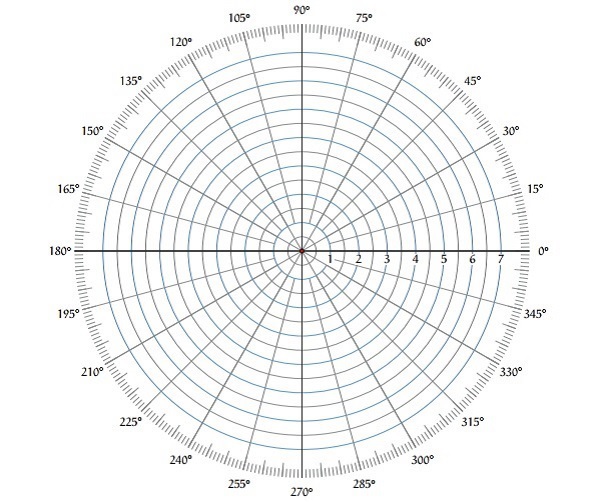
该图形表由同心圆和径向线组成。同心圆和径向线分别代表幅度和相角。这些角度由逆时针方向上的正值表示。类似地,我们可以在顺时针方向上用负值表示角度。例如,逆时针方向的角度270 0等于顺时针方向的角度-90 0 。
绘制极坐标图的规则
遵循这些规则来绘制极坐标图。
-
用开环传递函数$ s = j \ omega $代替。
-
写下$ G(j \ omega)H(j \ omega)$的大小和相位的表达式。
-
通过代入$ \ omega = 0 $,找到$ G(j \ omega)H(j \ omega)$的起始大小和相位。因此,极坐标图以该幅度和相角开始。
-
通过代入$ \ omega = \ infty $,找出$ G(j \ omega)H(j \ omega)$的结束幅度和相位。因此,极坐标图以该大小和相角结束。
-
通过使$ G(j \ omega)H(j \ omega)$的虚项等于零,并检查$ \ omega $的值,检查极坐标图是否与实轴相交。
-
通过使$ G(j \ omega)H(j \ omega)$的实项等于零,并找到$ \ omega $的值,检查极坐标图是否与虚轴相交。
-
为了更清楚地绘制极坐标图,请考虑$ \ omega $的其他值,找到$ G(j \ omega)H(j \ omega)$的大小和相位。
例
考虑闭环控制系统的开环传递函数。
$$ G(s)H(s)= \ frac {5} {s(s + 1)(s + 2)} $$
让我们使用上述规则绘制该控制系统的极坐标图。
步骤1-用开环传递函数代替$ s = j \ omega $。
$$ G(j \ omega)H(j \ omega)= \ frac {5} {j \ omega(j \ omega + 1)(j \ omega + 2)} $$
开环传递函数为
$$ M = \ frac {5} {\ omega(\ sqrt {\ omega ^ 2 + 1})(\ sqrt {\ omega ^ 2 + 4})} $$
开环传递函数的相角为
$$ \ phi = -90 ^ 0- \ tan ^ {-1} \ omega- \ tan ^ {-1} \ frac {\ omega} {2} $$
步骤2-下表显示了开环传递函数在$ \ omega = 0 $ rad / sec和$ \ omega = \ infty $ rad / sec时的大小和相位角。
| Frequency (rad/sec) | Magnitude | Phase angle(degrees) |
|---|---|---|
| 0 | ∞ | -90 or 270 |
| ∞ | 0 | -270 or 90 |
因此,极坐标图开始于(∞,-90 0 ),结束于(0,-270 0 )。括号内的第一项和第二项分别表示幅度和相位角。
步骤3-基于起点和终点极坐标,此极坐标图将与负实轴相交。与负实轴相对应的相角为-180 0或180 0 。因此,通过将开环传递函数的相位角等于-180 0或180 0 ,我们将获得$ \ omega $值作为$ \ sqrt {2} $。
通过将$ \ omega = \ sqrt {2} $替换为开环传递函数,我们将获得$ M = 0.83 $。因此,当$ \ omega = \ sqrt {2} $且极坐标为(0.83,-180 0 )时,极坐标图与负实轴相交。
因此,我们可以使用极坐标图中的上述信息绘制极坐标图。